ASC-15

ASC -15 (Advance System Controller Model 15) był komputerem cyfrowym opracowanym przez International Business Machines (IBM) do użytku w międzykontynentalnym pocisku balistycznym Titan II (ICBM). Został następnie zmodyfikowany i użyty w Titan III i Saturn I Block II.
Jego główną funkcją w tych rakietach było wykonywanie obliczeń nawigacyjnych przy użyciu danych z systemów czujników inercyjnych . Przeprowadził również kontrole gotowości przed startem. Był to cyfrowy procesor szeregowy wykorzystujący dane stałoprzecinkowe ze słowami 27-bitowymi. Magazynem była pamięć bębna . Obwody elektroniczne były spawanymi, zamkniętymi modułami, składającymi się z dyskretnych rezystorów , tranzystorów , kondensatorów i innych elementów zespawanych razem i zamkniętych w materiale piankowym. Został wyprodukowany w fabryce IBM w Owego w stanie Nowy Jork.
ASC-15 dla Tytana II
Pierwszy inercyjny system naprowadzania dla Titan II został zbudowany przez AC Spark Plug i obejmował inercyjną jednostkę pomiarową opartą na projektach Draper Labs z MIT oraz komputer ASC-15 zaprojektowany i zbudowany przez IBM w Owego, NY. Pierwszy pocisk Titan II przenoszący ten system został wystrzelony 16 marca 1962 r. Zdobycie części zamiennych do tego systemu stało się trudne, a Siły Powietrzne zdecydowały się zastąpić go nowym systemem. System AC Spark Plug, w tym ASC-15, został zastąpiony przez Delco Electronics Universal Space Guidance System (USGS) w operacyjnych pociskach Titan II począwszy od stycznia 1978 r. Komputerem naprowadzającym w USGS był Magic 352, wyprodukowany przez Delco.
ASC-15 został zbudowany na aluminiowej ramie o wymiarach około 1,5 x 1,5 x 1 stopy. Boki, górę i dół pokryto kawałkami laminowanego plastiku, pokrytego złoconą folią aluminiową. Osłony te były lekko wypukłe i żebrowane dla zwiększenia sztywności. Wewnątrz pokryw znajdowały się pięćdziesiąt dwa drążki logiczne, z których każdy zawierał cztery spawane, zamknięte moduły. Otaczały one ramę dzwonu, w której znajdowała się pamięć bębna. Patrz rysunek 2.
Bęben był cienkościennym cylindrem ze stali nierdzewnej o długości 3 cali i średnicy 4,5 cala, pokrytym magnetycznym stopem niklowo-kobaltowym. Napędzany był silnikiem synchronicznym z prędkością 6000 obr./min. Bęben miał 70 gąsienic, z czego 58 było używanych, a 12 było zapasowych. Te utwory zostały wykorzystane w następujący sposób:
| NIE. UTWORY | KORZYSTANIE Z TORÓW |
|---|---|
| 34 | Ścieżki instruktażowe |
| 7 | Stałe |
| 8 | Dane docelowe |
| 2 | Dane do tymczasowego przechowywania |
| 5 | Rewolwery zapewniające wyjątkowo szybki dostęp do magazynu |
| 2 | Tory czasowe |
Pojemność ścieżki wynosiła 1728 bitów. Słowa instrukcji miały długość 9 bitów, a dane były przechowywane w słowach 27-bitowych.
Zbieżne z 58 ścieżkami było 67 głowic czytających i 13 głowic zapisujących. Gdy bęben obracał się z prędkością 6000 obr./min, głowice unosiły się nad powierzchnią bębna na cienkiej warstwie powietrza. Kiedy bęben obracał się lub zwalniał, głowice były podnoszone z bębna przez wałki rozrządu obracane przez łańcuch napędzany silnikiem na górze obudowy bębna, aby uniknąć zarysowań powierzchni magnetycznej. Patrz rysunek 3.
ASC-15 dla Tytana III
Titan III był kosmicznym pojazdem nośnym opartym na międzykontynentalnej międzykontynentalnej balii międzykontynentalnej Titan II. ASC-15 pozostał jako komputer naprowadzający pojazd, ale bęben został nieco wydłużony, aby zapewnić 78 użytecznych gąsienic, co oznacza wzrost o 20 w stosunku do bębna używanego w Titan II. Pamięć zawierała 9792 instrukcji (51 ścieżek) i 1152 stałych (18 ścieżek). Szybkość była taka sama jak w przypadku Titana II: 100 obrotów na sekundę × 64 słowa na obrót × 27 bitów na słowo = 172,8 kilobitów na sekundę. Czas operacji dodawania wynosił 156 μs ; dla mnożenia 1875 μs ; a dla podziału 7968 μs .
ASC-15 dla Saturna I

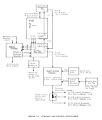
Żaden komputer naprowadzający nie był używany dla Saturn I Block I (misje SA-1, 2, 3 i 4). System naprowadzania dla SA-2 pokazano na rysunku 4. Program nachylenia został dostarczony przez urządzenie krzywkowe umieszczone w skrzynce wzmacniacza pętli serwo. Sekwencja zdarzeń była kontrolowana przez urządzenie programowe, które było również używane w pociskach Jupiter. Był to 6-ścieżkowy magnetofon, który wysyłał impulsy do zestawu przekaźników (sekwencer lotu), aby aktywować i dezaktywować różne obwody w ściśle określonej sekwencji czasowej.
ASC-15 został po raz pierwszy oblatany na SA-5, pierwszym pojeździe Saturn I Block II i pierwszym, który osiągnął orbitę. W tej misji był pasażerem, nie kierując pojazdem, ale generując dane testowe do późniejszej oceny. Aktywny system naprowadzania na SA-5 był podobny do tego z wcześniejszych lotów. Systemem pasażerskim była platforma inercyjna ASC-15 i ST-124 . Wytyczne były w otwartej pętli; to znaczy polecenia naprowadzania były funkcjami tylko czasu. SA-5 był również świadkiem wprowadzenia Instrument Unit .
Na SA-6, podczas gdy naprowadzanie ST-90S w otwartej pętli było używane dla pierwszego stopnia (SI), po rozdzieleniu ST-124 i ASC-15 wykorzystywały naprowadzanie z adaptacją ścieżki (pętla zamknięta) do sterowania drugim stopniem (S-IV) . System naprowadzania SA-6 przedstawiono na rysunku 5. Skuteczność naprowadzania z adaptacją do ścieżki została zademonstrowana przypadkowo, gdy przedwczesne wyłączenie ósmego silnika S-IV praktycznie nie miało wpływu na trajektorię pojazdu.
Rozmieszczenie systemów ST-90S i ST-124 (w tym komputera naprowadzania ASC-15) na SA-6 pokazano na rysunku 6. Jest to wersja 1 Instrument Unit, która latała na samolotach SA-5, 6 i 7.
W SA-7 system ST-124 kierował strzelaniem z obu stopni. System naprowadzania i sterowania dla SA-7 pokazano na rysunku 7. Komputerem cyfrowym jest ASC-15. Zastąpił zarówno urządzenie krzywkowe, które zawierało program przechyłu SI dla wcześniejszych misji, jak i urządzenie programowe, które kontrolowało sekwencję wydarzeń w tych misjach.
Następną misją wykonaną po SA-7 był SA-9. Zawierał nową wersję instrumentu, która była bezciśnieniowa i o 2 stopy (0,61 m) krótsza niż wersja 1. Wersja 2 latała na pozostałych misjach Saturn I (SA-8, 9 i 10). [ potrzebne źródło ]
Galeria

Komputer naprowadzania pocisków (MGC) dla Titan II.

Rozstrzelony widok MGC.

Pamięć bębna ASC-15

Układ sterowania SA-2

System naprowadzania i sterowania SA-6

Jednostka instrumentu dla SA-6
System naprowadzania i sterowania SA-7

Jednostka oprzyrządowania SA-8 w budowie w Marshall Space Flight Center (MSFC)

Fragment zespołu przyrządów SA-8 z manekinami oznaczonymi dla ASC-15 i ST-124.






.jpg)

Notatki
- Centrum szkolenia technicznego USAF Sheppard. „Przewodnik dla studentów, wyrzutnia rakiet / oficer rakietowy (LGM-25).” Maj 1967. Strony 61–65. Dostępne na WikiMedia Commons
- Stumpf, David K. (1 stycznia 2000). Titan II: Historia programu rakietowego z czasów zimnej wojny . Wydawnictwo Uniwersytetu Arkansas. s. 63–65. ISBN 978-1-55728-601-7 .
- Bilstein, Roger E. (1980). Etapy do Saturna: historia technologiczna pojazdów startowych Apollo / Saturn . ISBN 0-16-048909-1 . NASA SP-4206. Jako PDF .
- Olsen, PF; Pomarańczowy, RJ (wrzesień 1981). „Systemy czasu rzeczywistego dla aplikacji federalnych. Przegląd znaczących osiągnięć technologicznych” (PDF) . IBM J. Res. Dev . 25 (5): 405–416. doi : 10.1147/rd.255.0405 .
- Cooper, AE; Chow, WT (styczeń 1976). „Rozwój pokładowych kosmicznych systemów komputerowych”. IBM Journal of Research and Development . 20 (1): 5–19. Bibcode : 1976IBMJ...20....5C . CiteSeerX 10.1.1.95.2866 . doi : 10.1147/rd.201.0005 .
- Larson, Paul O. (1965). „System naprowadzania bezwładnościowego Titan III” . Drugie doroczne spotkanie AIAA, San Francisco, 26–29 lipca 1965 r . Dokumenty AIAA. s. 1–11. 65-306.
- Liang, AC; Kleinbub, DL (sierpień 1973). „Nawigacja kosmicznego pojazdu nośnego Titan IIIC przy użyciu Carousel VB IMU” . Konferencja AIAA ds. poradnictwa i kontroli, Key Biscayne, Floryda, 20–22 . Dokumenty AIAA. 73-905.
- „Saturn I Podsumowanie” . MSFC NASA. 15 lutego 1966. hdl : 2060/19660014308 . Źródło 2022-05-06 .
- Grupa robocza ds. Oceny lotów Saturna (22 września 1964). „Wyniki piątego lotu testowego pojazdu wystrzeliwującego Saturn I (SA-5)” (PDF) . MSFC NASA. MPR-SAT-FE-64-17. Zarchiwizowane od oryginału (PDF) w dniu 19 lipca 2021 r . Źródło 7 lipca 2017 r .
- Grupa Robocza ds. Oceny Lotów Saturna (1 października 1964). „Wyniki szóstego lotu testowego pojazdu startowego Saturn I (SA-6)” (PDF) . MSFC NASA. MPR-SAT-FE-64-18. Zarchiwizowane od oryginału (PDF) w dniu 19 lipca 2021 r . Źródło 7 lipca 2017 r .
- Grupa Robocza ds. Oceny Lotów Saturna (30 grudnia 1964). „Wyniki siódmego lotu testowego pojazdu startowego Saturn I (SA-7)” (PDF) . MSFC NASA. MPR-SAT-FE-64-19. Zarchiwizowane od oryginału (PDF) w dniu 16 marca 2021 r . Źródło 7 lipca 2017 r .
- Status niezawodności podsystemów DRAFT (PDF) . Raport stanu niezawodności systemów Apollo. Tom. 2. NASA. 23 września 1963.
-
NASA (marzec 1971). „Cyfrowe systemy komputerowe w kosmosie”. NASA SP-8070.
{{ cite journal }}: Cite journal wymaga|journal=( pomoc )
Linki zewnętrzne
- „Komputer rakietowy Titan II” . IBM Archives: Chronologia lotów kosmicznych . 23 stycznia 2003 r.
- Weik, Martin H. (marzec 1961). „Trzecie badanie krajowych elektronicznych cyfrowych systemów komputerowych” . Ballistic Research Laboratories, Aberdeen Proving Ground, Maryland. s. 58–59. Raport nr 1115. Ta strona zawiera link do obrazu spawanego modułu w obudowie. Mówi też, że ASC 15 oznacza Advance System Controller Model 15.
|
Komputery naprowadzające
| |
|---|---|
| Na statku kosmicznym z załogą | |
| Na pojazdach nośnych |
|