W analizie numerycznej metoda linearyzacji lokalnej (LL) jest ogólną strategią projektowania integratorów numerycznych dla równań różniczkowych w oparciu o lokalną (odcinkową) linearyzację danego równania w kolejnych przedziałach czasu. Integratory numeryczne są następnie iteracyjnie definiowane jako rozwiązanie otrzymanego odcinkowo równania liniowego na końcu każdego kolejnego przedziału. Metoda LL została opracowana dla różnych równań, takich jak zwykłe , opóźnione , losowe i stochastyczne równania różniczkowe. Integratory LL są kluczowym elementem implementacji metod wnioskowania do estymacji nieznanych parametrów i nieobserwowalnych zmiennych równań różniczkowych na podstawie szeregów czasowych (potencjalnie zaszumionych) obserwacji. Schematy LL są idealne do radzenia sobie ze złożonymi modelami w różnych dziedzinach, takich jak neuronauka , finanse , gospodarka leśna , inżynieria sterowania , statystyka matematyczna itp.
Tło
Równania różniczkowe stały się ważnym narzędziem matematycznym do opisu ewolucji w czasie wielu zjawisk, np. rotacji planet wokół Słońca, dynamiki cen aktywów na rynku, pożaru neuronów, rozprzestrzeniania się epidemii itp. Jednakże, ponieważ dokładne rozwiązania tych równań są zwykle nieznane, konieczne są numeryczne przybliżenia do nich uzyskane za pomocą integratorów numerycznych. Obecnie wiele zastosowań w inżynierii i naukach stosowanych ukierunkowanych na badania dynamiczne wymaga opracowania wydajnych integratorów numerycznych, które w jak największym stopniu zachowują dynamikę tych równań. Kierując się tą główną motywacją, opracowano integratory Local Linearization.
Metoda linearyzacji lokalnej wysokiego rzędu
Metoda linearyzacji lokalnej wysokiego rzędu (HOLL) jest uogólnieniem metody linearyzacji lokalnej ukierunkowanej na uzyskanie integratorów wysokiego rzędu dla równań różniczkowych, które zachowują stabilność i dynamikę równań liniowych. Integratory uzyskuje się przez podzielenie, w kolejnych przedziałach czasu, rozwiązania x pierwotnego równania na dwie części: rozwiązanie z lokalnie zlinearyzowanego równania plus przybliżenie wysokiego rzędu reszty  .
.
Lokalny schemat linearyzacji
Schemat linearyzacji lokalnej (LL) jest ostatecznym algorytmem rekurencyjnym , który umożliwia numeryczną implementację dyskretyzacji wyprowadzonej z metody LL lub HOLL dla klasy równań różniczkowych.
Metody LL dla ODE
Rozważ d -wymiarowe równanie różniczkowe zwyczajne (ODE)
![{\displaystyle {\frac {d\mathbf {x} \left(t\right)}{dt}}=\mathbf {f} \left(t,\mathbf {x} \left(t\right)\right),\qquad t\in \left[t_{0},T\right],\qquad \qquad \qquad \qquad (4.1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b689077ae401751f25375eb3338ed66cc57f756a)
z warunkiem początkowym  , gdzie
, gdzie  jest funkcją różniczkowalną .
jest funkcją różniczkowalną .
Niech  czasu
czasu ![{\displaystyle [t_{0},T]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/986ba7ea2bc36ce31beb5c5f4faffbfb6405f69b) z maksymalnym stopniem h takim, że
z maksymalnym stopniem h takim, że  i
i  . Po lokalnej linearyzacji równania (4.1) w kroku czasowym wariacja stałych równań daje
. Po lokalnej linearyzacji równania (4.1) w kroku czasowym wariacja stałych równań daje 

Gdzie

wynika z przybliżenia liniowego, oraz

jest resztą z liniowego przybliżenia. Tutaj 
 oznaczają f względem zmiennych x i t , odpowiednio, i
oznaczają f względem zmiennych x i t , odpowiednio, i 
Lokalna dyskretyzacja liniowa
Dla dyskretyzacji czasu  , lokalna dyskretyzacja liniowa ODE (4.1) w każdym punkcie
, lokalna dyskretyzacja liniowa ODE (4.1) w każdym punkcie  jest zdefiniowane przez wyrażenie rekurencyjne
jest zdefiniowane przez wyrażenie rekurencyjne

Lokalna dyskretyzacja liniowa (4.3) jest zbieżna z rzędem 2 do rozwiązania nieliniowych ODE, ale pasuje do rozwiązania liniowych ODE. Rekurencja (4.3) jest również znana jako wykładnicza dyskretyzacja Eulera.
Lokalne dyskretyzacje liniowe wysokiego rzędu
Dla dyskretyzacji czasu  lokalnej dyskretyzacji liniowej wysokiego rzędu (HOLL) ODE (4.1) w każdym punkcie
lokalnej dyskretyzacji liniowej wysokiego rzędu (HOLL) ODE (4.1) w każdym punkcie  jest zdefiniowane przez wyrażenie rekurencyjne
jest zdefiniowane przez wyrażenie rekurencyjne

gdzie  jest rzędem przybliżenia do reszty r
jest rzędem przybliżenia do reszty r  > 2
> 2  Dyskretyzacja HOLL (4.4) zbiega się z rzędem do rozwiązania nieliniowych ODE, ale pasuje do rozwiązania liniowych ODE.
Dyskretyzacja HOLL (4.4) zbiega się z rzędem do rozwiązania nieliniowych ODE, ale pasuje do rozwiązania liniowych ODE.
Dyskretyzacje HOLL-a można wyprowadzić na dwa sposoby: 1) (na podstawie kwadratur) przez aproksymację całkowej reprezentacji (4.2) r ; oraz 2) (oparte na integratorze) przy użyciu integratora numerycznego dla reprezentacji różniczkowej r określonej przez

dla wszystkich ![{\displaystyle t\in \lbrack t_{k},t_{k+1}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dacd0fb31482f9ac95b8c3261d9dc00f1055dca4) gdzie
gdzie

Dyskretyzacje HOLL to na przykład:
-
Lokalnie zlinearyzowana dyskretyzacja Runge Kutta

który otrzymuje się przez rozwiązanie (4.5) za pomocą s-etapowego jawnego schematu Runge-Kutty (RK) ze współczynnikami ![{\displaystyle \mathbf {c} =\left[c_{i}\right],\mathbf {A} =\left[a_{ij}\right]\quad and\quad \mathbf {b} =\left[b_{j}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6fbc317004aaf306e62ecc1c6d08e4f49d9d0543) .
.
-
Lokalna liniowa dyskretyzacja Taylora

co wynika z przybliżenia w (4.2) przez jego okrojone rozwinięcie Taylora rzędu p . 
- Dyskretyzacja propagacji wykładniczej typu wieloetapowego

sol  w (4.2) wielomianem stopnia p na , gdzie
w (4.2) wielomianem stopnia p na , gdzie  oznacza j -ty wsteczna różnica sol
oznacza j -ty wsteczna różnica sol  .
.
-
Dyskretyzacja typu Runge Kutta z propagacją wykładniczą

sol  w (4.2) przez wielomian stopnia p na ,
w (4.2) przez wielomian stopnia p na ,
-
Zliniowana wykładnicza dyskretyzacja Adamsa

sol w (4.2) przez wielomian hermite'a stopnia p na .
Lokalne schematy linearyzacji
 numeryczna implementacja dyskretyzacji LL (lub HOLL)
numeryczna implementacja dyskretyzacji LL (lub HOLL) 
 obejmuje przybliżenia do całek postaci
obejmuje przybliżenia do całek postaci 

gdzie A jest macierzą d × d . Każda numeryczna implementacja (lub HOLL) kolejności jest ogólnie nazywana Linearyzacją lokalną y schemat .
Obliczanie całek z macierzą wykładniczą
Spośród wielu algorytmów do obliczania całek te oparte na racjonalnych przybliżeniach podprzestrzeni Padé i Kryłowa dla macierzy wykładniczej W tym celu kluczową rolę odgrywa ekspresja

gdzie są d -wymiarowymi wektorami, 

![{\displaystyle \mathbf {L} =[\mathbf {I} \quad \mathbf {0} _{d\times l}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/75b8ac2636b6ebd86e0bba8f06886336cfc6ec82) ,
, ![{\displaystyle \mathbf {r} =[\mathbf {0} _{1\times (d+l-1)}\quad 1]^{\intercal },}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3710227203d25399ba90fb8e8f94a9d34ff29aa9)

 d -wymiarową macierzą tożsamości.
d -wymiarową macierzą tożsamości.
P  ( p ; q ) - Padé przybliżenie mi
( p ; q ) - Padé przybliżenie mi  i k jest najmniejszą liczbą naturalną taką,
i k jest najmniejszą liczbą naturalną taką, 

k  oznacza przybliżenie ( m ; p ; q ; k ) Krylov-Padé a następnie mi
oznacza przybliżenie ( m ; p ; q ; k ) Krylov-Padé a następnie mi 

gdzie  jest wymiarem podprzestrzeni Kryłowa.
jest wymiarem podprzestrzeni Kryłowa.
Zamówienie-2 schematy LL


gdzie macierze L i r są zdefiniowane jako 

![{\displaystyle \mathbf {L} =\left[{\begin{array}{ll}\mathbf {I} &\mathbf {0} _{d\times 2}\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/05d54f18477ecdb4b717abf25a75b96d17729bcd) i
i ![{\displaystyle \mathbf {r} ^{\intercal }=\left[{\begin{array}{ll}\mathbf {0} _{1\times (d+1)}&1\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f82230fb66e66705351377690e9f14c8d4a41224) z
z  . Dla dużych systemów ODE
. Dla dużych systemów ODE

Zamówienie-3 schematy LL-Taylor


gdzie dla autonomicznych ODE macierze  i
i  są określone jako
są określone jako
![{\displaystyle \mathbf {T} _{n}=\left[{\begin{array}{cccc}\mathbf {f} _{\mathbf {x} }(\mathbf {y} _{n})&(\mathbf {I} \otimes \mathbf {f} ^{\intercal }(\mathbf {y} _{n}))\mathbf {f} _{\mathbf {xx} }(\mathbf {y} _{n})\mathbf {f} (\mathbf {y} _{n})&\mathbf {0} &\mathbf {f} (\mathbf {y} _{n})\\0&0&0&0\\0&0&0&1\\0&0&0&0\end{array}}\right]\in \mathbb {R} ^{(d+3)\times (d+3)},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/04b4535597fcece8be4c40e7b4ae75229d8f9831)
![{\displaystyle \mathbf {L} _{1}=\left[{\begin{array}{ll}\mathbf {I} &\mathbf {0} _{d\times 3}\end{array}}\right]\quad and\quad \mathbf {r} _{1}^{\intercal }=\left[{\begin{array}{ll}\mathbf {0} _{1\times (d+2)}&1\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f495cb0102ab17316c499936bd236cdb35f4ebbd) . Tutaj,
. Tutaj,  oznacza drugą pochodną f względem x i p + q > 2 . Dla dużych systemów ODE
oznacza drugą pochodną f względem x i p + q > 2 . Dla dużych systemów ODE

Zamówienie-4 schematy LL-RK


Gdzie

I

z ![{\displaystyle \mathbf {k} _{1}\equiv \mathbf {0} ,c=\left[{\begin{array}{cccc}0&{\frac {1}{2}}&{\frac {1}{2}}&1\end{array}}\right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5c7569810b131c3d8e9ad24b6201f9454d90fbbc) i p + q > 3 . W przypadku dużych systemów
i p + q > 3 . W przypadku dużych systemów  wektor powyższym schemacie jest zastępowany
wektor powyższym schemacie jest zastępowany  z
z 
Lokalnie zlinearyzowany schemat Runge-Kutty Dormanda i Prince'a


gdzie s = 7 to liczba stopni,

k 
 , to współczynniki Runge-Kutty Dormanda i Prince'a oraz p + q > 4. Wektor w powyższym schemacie jest obliczana przez przybliżenie Padé lub Krylor-Padé odpowiednio dla małych lub dużych systemów ODE.
, to współczynniki Runge-Kutty Dormanda i Prince'a oraz p + q > 4. Wektor w powyższym schemacie jest obliczana przez przybliżenie Padé lub Krylor-Padé odpowiednio dla małych lub dużych systemów ODE.
Stabilność i dynamika
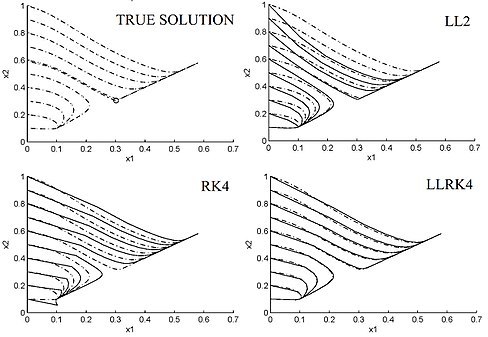
Rys. 1 Portret fazowy (linia przerywana) i przybliżony portret fazowy (linia ciągła) nieliniowego ODE (4.10)-(4.11) obliczonego według schematu LL rzędu 2 (4.2), klasycznego schematu Rugena-Kutty rzędu 4
RK 4 i schematy
rzędu 4 LLRK 4 (4.8) z wielkością kroku h=1/2 i p=q=6.
Z założenia dyskretyzacje LL i HOLL dziedziczą stabilność i dynamikę liniowych ODE, ale ogólnie nie dotyczy to schematów LL. Z  , schematy LL (4,6) - (4,9) są A -stabilne . Przy q = p + 1 lub q = p + 2, schematy LL (4.6)–(4.9) są również L -stabilne . Dla liniowych ODE schematy LL (4.6)-(4.9) są zbieżne z rzędem p + q . Ponadto, przy p = q = 6 i
, schematy LL (4,6) - (4,9) są A -stabilne . Przy q = p + 1 lub q = p + 2, schematy LL (4.6)–(4.9) są również L -stabilne . Dla liniowych ODE schematy LL (4.6)-(4.9) są zbieżne z rzędem p + q . Ponadto, przy p = q = 6 i  , wszystkie opisane powyżej schematy LL dają „dokładne obliczenie” (z dokładnością do arytmetyki zmiennoprzecinkowej liniowej ODE na obecnych komputerach osobistych. Obejmuje to sztywne i wysoce oscylacyjne równania liniowe. Ponadto schematy LL (4.6)-(4.9) są regularne dla liniowych ODE i dziedziczą symplektyczną strukturę hamiltonowskich oscylatorów harmonicznych . Te schematy LL zachowują również linearyzację i wykazują lepszą reprodukcję stabilnych i niestabilnych rozmaitości wokół hiperbolicznych punktów równowagi i orbit okresowych niż inne schematy numeryczne o tym samym rozmiarze kroku. Na przykład rysunek 1 przedstawia portret fazowy ODE
, wszystkie opisane powyżej schematy LL dają „dokładne obliczenie” (z dokładnością do arytmetyki zmiennoprzecinkowej liniowej ODE na obecnych komputerach osobistych. Obejmuje to sztywne i wysoce oscylacyjne równania liniowe. Ponadto schematy LL (4.6)-(4.9) są regularne dla liniowych ODE i dziedziczą symplektyczną strukturę hamiltonowskich oscylatorów harmonicznych . Te schematy LL zachowują również linearyzację i wykazują lepszą reprodukcję stabilnych i niestabilnych rozmaitości wokół hiperbolicznych punktów równowagi i orbit okresowych niż inne schematy numeryczne o tym samym rozmiarze kroku. Na przykład rysunek 1 przedstawia portret fazowy ODE
![{\displaystyle {\begin{aligned}&{\frac {dx_{1}}{dt}}=-2x_{1}+x_{2}+1-\mu f(x_{1},\lambda )\qquad \qquad (4.10)\\[6pt]&{\frac {dx_{2}}{dt}}=x_{1}-2x_{2}+1-\mu f(x_{2},\lambda )\qquad \qquad \quad (4.11)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/855ec9f888ae9f2a03221800414cbf76ef9edd46)
z  ,
,  i
i  i jego przybliżenie różnymi schematami. Układ ten ma dwa stabilne punkty stacjonarne i jeden niestabilny punkt stacjonarny w regionie
i jego przybliżenie różnymi schematami. Układ ten ma dwa stabilne punkty stacjonarne i jeden niestabilny punkt stacjonarny w regionie  .
.
Metody LL dla DDE
Rozważ d -wymiarowe równanie różniczkowe opóźnienia (DDE)
![{\displaystyle {\frac {d\mathbf {x} (t)}{dt}}=\mathbf {f} (t,\mathbf {x} (t),\mathbf {x} _{t}(-\tau _{1}),\ldots ,\mathbf {x} _{t}(-\tau _{m})),\qquad t\in [t_{0},T],\qquad \qquad (5.1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/682b3725e57d7e2ee5324a0a139b7e2d1063767b)
z m stałymi opóźnieniami  i warunek początkowy
i warunek początkowy  dla wszystkich
dla wszystkich ![{\displaystyle s\in [-\tau ,0],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9e9d0232ea2938ec04dafc8665c88403f10670c3) gdzie f jest funkcją różniczkowalną,
gdzie f jest funkcją różniczkowalną, ![{\displaystyle \mathbf {x} _{t}:[-\tau ,0]\longrightarrow \mathbb {R} ^{d}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/026aa256631bc0e92437d8cea3a76cd0c6c2aded) funkcją segmentu zdefiniowaną jako
funkcją segmentu zdefiniowaną jako
![{\displaystyle \mathbf {x} _{t}(s):=\mathbf {x} (t+s),{\text{ }}s\in [-\tau ,0],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/857fd392ec867a13d23dcb2ea2d705d132a706d6)
dla wszystkich ![{\displaystyle t\in [t_{0},T],\mathbf {\varphi } :[-\tau ,0]\longrightarrow \mathbb {R} ^{d}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/332fbe38ea2b9aa1ca97db545170bba5e188883f) jest daną funkcją, a
jest daną funkcją, a 
Lokalna dyskretyzacja liniowa
Dla dyskretyzacji czasu  , lokalna liniowa dyskretyzacja DDE (5.1) w każdym punkcie jest zdefiniowane przez wyrażenie rekurencyjne
, lokalna liniowa dyskretyzacja DDE (5.1) w każdym punkcie jest zdefiniowane przez wyrażenie rekurencyjne

Gdzie
![{\displaystyle \Phi (t_{n},\mathbf {z} _{n},h_{n};{\widetilde {\mathbf {z} }}_{t_{n}}^{1},\ldots ,{\widetilde {\mathbf {z} }}_{t_{n}}^{m})=\int \limits _{0}^{h_{n}}e^{\mathbf {A} _{n}(h_{n}-u)}\left[\sum \limits _{i=1}^{m}\mathbf {B} _{n}^{i}({\widetilde {\mathbf {z} }}_{t_{n}}^{i}(u-\tau _{i})-{\widetilde {\mathbf {z} }}_{t_{n}}^{i}(-\tau _{i}))+\mathbf {d} _{n}\right]\,du+\int \limits _{0}^{h_{n}}\int \limits _{0}^{u}e^{\mathbf {A} _{n}(h_{n}-u)}\mathbf {c} _{n}\,dr\,du}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d522057eb0209091646bcc9221b24d9e13d0e371)
![{\displaystyle {\widetilde {\mathbf {z} }}_{t_{n}}^{i}:\left[-\tau _{i},0\right]\longrightarrow \mathbb {R} ^{d}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d3f4bc0cc5b10a10d0844d2265aababd5028d6e4) to funkcja segmentu zdefiniowana jako
to funkcja segmentu zdefiniowana jako
![{\displaystyle {\widetilde {\mathbf {z} }}_{t_{n}}^{i}(s):={\widetilde {\mathbf {z} }}^{i}(t_{n}+s),{\text{ }}s\in [-\tau _{i},0],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d4c1d308208faf6bc44261b2ce1b128a9f394195)
i ![{\displaystyle {\widetilde {\mathbf {z} }}^{i}:\left[t_{n}-\tau _{i},t_{n}\right]\longrightarrow \mathbb {R} ^{d}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/922ac10d7369b3ff0ffe9487ebb8a509a1305574)
 przybliżeniem dla wszystkich
przybliżeniem dla wszystkich ![{\displaystyle t\in \lbrack t_{n}-\tau _{i},t_{n}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1f287009ce5d61c9d7ed2a843c93dfdef6226a50) takie, że
takie, że  ,
,

są macierzami stałymi i

są stałymi wektorami.  oznaczamy odpowiednio pochodne cząstkowe f względem zmiennych t i x oraz
oznaczamy odpowiednio pochodne cząstkowe f względem zmiennych t i x oraz  . Lokalna dyskretyzacja liniowa (5.2) zbiega się do rozwiązania (5.1) z rzędem
. Lokalna dyskretyzacja liniowa (5.2) zbiega się do rozwiązania (5.1) z rzędem  jeśli
jeśli  przybliża
przybliża  z rzędem
z rzędem  dla wszystkich
dla wszystkich ![{\displaystyle u\in \lbrack 0,h_{n}])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/956d5d79b8e61251940a26652b1ecead7daa8b6c) .
.
Lokalne schematy linearyzacji
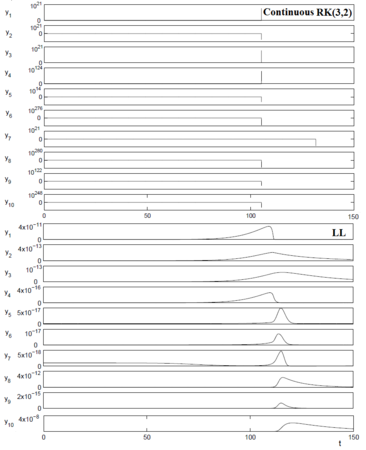
Ryc. 2 Przybliżone ścieżki Marchuk
et al. (1991) przeciwwirusowy model immunologiczny opisany sztywnym systemem dziesięciowymiarowych nieliniowych DDE z pięcioma opóźnieniami czasowymi: górny, ciągły schemat
Runge-Kutty (2,3) ; dół, schemat LL (5.3). Wielkość kroku
h = 0,01 stała, a
p =
q = 6.
W zależności od przybliżeń ϕ  można zdefiniować różne schematy Linearyzacji Lokalnych. numeryczna implementacja liniowej jest nazywana lokalnym schematem
można zdefiniować różne schematy Linearyzacji Lokalnych. numeryczna implementacja liniowej jest nazywana lokalnym schematem
Schematy wielomianowe rzędu 2 LL


gdzie macierze są zdefiniowane jako  i
i 

i ![{\displaystyle \mathbf {r} ^{\intercal }=\left[{\begin{array}{ll}\mathbf {0} _{1\times (d+1)}&1\end{array}}\right],h_{n}\leq \tau }](https://wikimedia.org/api/rest_v1/media/math/render/svg/05fdb2050667c7b12025db96c59b015211204a57) i . Tutaj macierze
i . Tutaj macierze  ,
,  ,
,  i
i  są zdefiniowane jak w (5.2), ale zastępując
są zdefiniowane jak w (5.2), ale zastępując 
 i
i  gdzie
gdzie

gdzie  , jest Lokalnym Przybliżeniem Liniowym rozwiązania (5.1) określonym schematem LL (5.3) dla wszystkich
, jest Lokalnym Przybliżeniem Liniowym rozwiązania (5.1) określonym schematem LL (5.3) dla wszystkich ![{\displaystyle t\in \lbrack t_{0},t_{n}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8ed17e1a454d79e9e85aa3fdb316727d17eb069b) i przez
i przez  dla
dla ![{\displaystyle t\in \left[t_{0}-\tau ,t_{0}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/99fafe4165d02d310ce7c3f55c6fbfc1742d2d65) . Dla dużych systemów DDE
. Dla dużych systemów DDE

z i  . Rys. 2 ilustruje stabilność schematu LL (5.3) oraz jawnego schematu podobnego rzędu w integracji sztywnego systemu DDE.
. Rys. 2 ilustruje stabilność schematu LL (5.3) oraz jawnego schematu podobnego rzędu w integracji sztywnego systemu DDE.
Metody LL dla RDE
Rozważ d- wymiarowe losowe równanie różniczkowe (RDE)
![{\displaystyle {\frac {d\mathbf {x} \left(t\right)}{dt}}=\mathbf {f} (\mathbf {x} (t),\mathbf {\xi } (t)),\quad t\in \left[t_{0},T\right],\qquad \qquad \qquad (6.1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/06e7f4c5cbe530e829f8edf84e2e49d0829a2ef0)
z warunkiem początkowym  gdzie jest
gdzie jest  k -wymiarowy rozdzielny skończony ciągły proces stochastyczny , a f jest funkcją różniczkowalną. Załóżmy, że podana jest realizacja (ścieżka)
k -wymiarowy rozdzielny skończony ciągły proces stochastyczny , a f jest funkcją różniczkowalną. Załóżmy, że podana jest realizacja (ścieżka)
Lokalna dyskretyzacja liniowa
Dla dyskretyzacji czasu , lokalna liniowa dyskretyzacja RDE (6.1) w każdym punkcie jest zdefiniowane przez wyrażenie rekurencyjne

Gdzie

i 
![{\displaystyle t\in \left[t_{0},T\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aedde214e225a352a24c1c922043d56a7d90588b) procesu dla Tutaj
procesu dla Tutaj  i
i  oznaczają pochodne cząstkowe względem
oznaczają pochodne cząstkowe względem 
 i .
i .
Lokalne schematy linearyzacji

Rys. 3 Portret fazowy trajektorii schematów
Eulera i
LL w całkowaniu nieliniowego RDE (6.2)–(6.3) o wielkości kroku
h = 1/32 i
p =
q = 6.
zależności od przybliżeń do procesu i algorytmu do obliczania , można zdefiniować różne schematy linearyzacji lokalnych. Każda numeryczna implementacja dyskretyzacji liniowej ogólnie schematem
schematy LL
gdzie macierze są zdefiniowane jako 
![{\displaystyle \mathbf {M} _{n}=\left[{\begin{array}{ccc}\mathbf {f} _{\mathbf {x} }\left(\mathbf {y} _{n},\mathbf {\xi } (t_{n})\right)&\mathbf {f} _{\mathbf {\xi } }(\mathbf {y} _{n},\mathbf {\xi } (t_{n})(\mathbf {\xi } (t_{n+1})-\mathbf {\xi } (t_{n}))/h_{n}&\mathbf {f} \left(\mathbf {y} _{n},\mathbf {\xi } (t_{n})\right)\\0&0&1\\0&0&0\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/de2e549c00febeadc80e1df68d44a6a66abd159a)
, i p+q>1 . W przypadku dużych systemów RDE,

Współczynnik zbieżności obu schematów wynosi  , gdzie jest wykładnikiem warunku posiadacza
, gdzie jest wykładnikiem warunku posiadacza  .
.
Rysunek 3 przedstawia portret fazowy RDE


i jego przybliżenie za pomocą dwóch schematów numerycznych, gdzie oznacza  proces z wykładnikiem Hursta H = 0,45
proces z wykładnikiem Hursta H = 0,45
Silne metody LL dla SDE
Rozważ d -wymiarowe stochastyczne równanie różniczkowe (SDE)
![{\displaystyle d\mathbf {x} (t)=\mathbf {f} (t,\mathbf {x} (t))dt+\sum \limits _{i=1}^{m}\mathbf {g} _{i}(t)d\mathbf {w} ^{i}(t),\quad t\in \left[t_{0},T\right],\qquad \qquad \qquad (7.1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/464be59af5611f27dd6d946030a7202ce481c427)
z warunkiem początkowym _ , gdzie współczynnik dryfu i sol  są funkcjami różniczkowalnymi i
są funkcjami różniczkowalnymi i  jest m -wymiarowy standardowy proces Wienera .
jest m -wymiarowy standardowy proces Wienera .
Lokalna dyskretyzacja liniowa
Dla dyskretyzacji czasu , kolejność -  (= 1,1,5) Silna lokalna liniowa dyskretyzacja rozwiązanie SDE (7.1) jest określone relacją rekurencyjną
(= 1,1,5) Silna lokalna liniowa dyskretyzacja rozwiązanie SDE (7.1) jest określone relacją rekurencyjną

Gdzie

I

Tutaj,

 oznaczają pochodne cząstkowe względem zmienne t , oraz macierz Hesji z w odniesieniu do . Silna lokalna dyskretyzacja liniowa
oznaczają pochodne cząstkowe względem zmienne t , oraz macierz Hesji z w odniesieniu do . Silna lokalna dyskretyzacja liniowa  się z porządkiem = 1, 1,5) do rozwiązania (7,1) z ).
się z porządkiem = 1, 1,5) do rozwiązania (7,1) z ).
Lokalne dyskretyzacje liniowe wysokiego rzędu
Po lokalnej linearyzacji składnika dryfu (7.1) w  równanie reszty jest podane przez
równanie reszty jest podane przez

dla wszystkich ![{\displaystyle t\in \lbrack t_{n},t_{n+1}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b15f801777044ac19f6f4e6551c3e78da54f33c5) gdzie
gdzie

Lokalna liniowa wysokiego SDE ) w definiowana wyrażenie

gdzie  silnym przybliżeniem reszty rzędu niż 1,5 . Silna dyskretyzacja HOLL do (7.1
silnym przybliżeniem reszty rzędu niż 1,5 . Silna dyskretyzacja HOLL do (7.1
Lokalne schematy linearyzacji
W zależności od sposobu obliczania  , i można uzyskać różne schematy numeryczne. Każda numeryczna implementacja lokalnej dyskretyzacji liniowej dowolnego rzędu jest ogólnie nazywana silną lokalną linearyzacją (SLL) y ) schemat .
, i można uzyskać różne schematy numeryczne. Każda numeryczna implementacja lokalnej dyskretyzacji liniowej dowolnego rzędu jest ogólnie nazywana silną lokalną linearyzacją (SLL) y ) schemat .
Zamów 1 schemat SLL


gdzie macierze są zdefiniowane  w (4.6), Δ
w (4.6), Δ  i jest iid zerową średnią zmienną losową Gaussa
i jest iid zerową średnią zmienną losową Gaussa  wariancją p + q > 1. duże systemy SDE, w powyższym schemacie
wariancją p + q > 1. duże systemy SDE, w powyższym schemacie  zastępowane przez
zastępowane przez  .
.
Zamów 1,5 schematu SLL

gdzie macierze są zdefiniowane jako , i

![{\displaystyle \mathbf {L} =\left[{\begin{array}{ll}\mathbf {I} &\mathbf {0} _{d\times 2}\end{array}}\right],\mathbf {r} ^{\intercal }=\left[{\begin{array}{ll}\mathbf {0} _{1\times (d+1)}&1\end{array}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4096111183a23671fc2d181a96e16ca7b7df6d6c) ,
,  mi
mi  i kowariancji
i kowariancji  i p+q>1 . W przypadku dużych systemów SDE, w powyższym schemacie przez .
i p+q>1 . W przypadku dużych systemów SDE, w powyższym schemacie przez .
Zamów 2 schematy SLL-Taylor


gdzie , , i są zdefiniowane jak w schematach SLL rzędu 1, a jest przybliżeniem rzędu 2 do wielokrotności  Całka Stratonovisha jot
Całka Stratonovisha jot  .
.
Zamów 2 schematy SLL-RK

Ryc. 4, góra : Ewolucja domen w płaszczyźnie fazowej oscylatora harmonicznego (7.6), przy ε=0 i ω=σ=1. Obrazy początkowego okręgu jednostkowego (kolor zielony) uzyskuje się w trzech momentach czasu
T za pomocą rozwiązania dokładnego (kolor czarny) oraz schematów
SLL1 (kolor niebieski) i
Implicit Euler (kolor czerwony) z
h=0,05 .
Dół : Oczekiwana wartość energii (linia ciągła) wzdłuż rozwiązania nieliniowego oscylatora (7.6), przy ε=1 i ω=100, oraz jej przybliżenie (okręgi) obliczone metodą Monte
Carlo z
10000 symulacji
SLL1 z
h=1/2 i
p=q=6 .
Dla SDE z pojedynczym szumem Wienera (m=1 )


Gdzie


z  .
.
 ) dla niskowymiarowych SDE i
) dla niskowymiarowych SDE i  dla dużych systemów SDE, gdzie L , Δ i są zdefiniowane w kolejności - 2 schematy SLL-Taylor, p + q> 1 i .
dla dużych systemów SDE, gdzie L , Δ i są zdefiniowane w kolejności - 2 schematy SLL-Taylor, p + q> 1 i .
Stabilność i dynamika
Z konstrukcji, silne dyskretyzacje LL i HOLL dziedziczą stabilność i dynamikę liniowych SDE, ale ogólnie nie jest tak w przypadku silnych schematów LL. 7.2 ) - (7.5) z A . Co więcej, w przypadku liniowych SDE z losowymi atraktorami schematy te mają również losowy atraktor, który jest zbieżny pod względem prawdopodobieństwa do dokładnego, gdy wielkość kroku maleje i zachowuje ergodyczność tych równań dla dowolnej wielkości kroku. Schematy te odtwarzają również podstawowe właściwości dynamiczne prostych i sprzężonych oscylatorów harmonicznych, takie jak liniowy wzrost energii wzdłuż ścieżek, zachowanie oscylacyjne wokół 0, symplektyczna struktura oscylatorów hamiltonowskich i średnia ścieżek. Dla nieliniowych SDE z małym szumem (tj. (7.1) z  ), ścieżki tych schematów SLL są w zasadzie nielosowymi ścieżkami schematu LL (4.6) dla ODE plus małe zakłócenie związane z małym szumem. W tej sytuacji właściwości dynamiczne tego schematu deterministycznego, takie jak zachowanie linearyzacji i zachowanie dokładnej dynamiki rozwiązania wokół punktów równowagi hiperbolicznej i orbit okresowych, stają się istotne dla ścieżek schematu SLL. Na przykład ryc. 4 przedstawia ewolucję domen w płaszczyźnie fazowej i energii oscylatora stochastycznego
), ścieżki tych schematów SLL są w zasadzie nielosowymi ścieżkami schematu LL (4.6) dla ODE plus małe zakłócenie związane z małym szumem. W tej sytuacji właściwości dynamiczne tego schematu deterministycznego, takie jak zachowanie linearyzacji i zachowanie dokładnej dynamiki rozwiązania wokół punktów równowagi hiperbolicznej i orbit okresowych, stają się istotne dla ścieżek schematu SLL. Na przykład ryc. 4 przedstawia ewolucję domen w płaszczyźnie fazowej i energii oscylatora stochastycznego

oraz ich przybliżenia za pomocą dwóch schematów numerycznych.
Słabe metody LL dla SDE
Rozważ d -wymiarowe stochastyczne równanie różniczkowe
![{\displaystyle d\mathbf {x} (t)=\mathbf {f} (t,\mathbf {x} (t))dt+\sum \limits _{i=1}^{m}\mathbf {g} _{i}(t)d\mathbf {w} ^{i}(t),\qquad t\in \left[t_{0},T\right],\qquad \qquad (8.1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4db0bd45e90a7c91e2715a14caf58e220b2e0b36)
z warunkiem początkowym , gdzie współczynnik dryfu i sol są funkcjami różniczkowalnymi i jest m -wymiarowy standardowy proces Wienera.
Lokalna dyskretyzacja liniowa
Dla dyskretyzacji czasu , kolejność - 
 Słaba lokalna dyskretyzacja liniowa rozwiązania SDE (8.1) jest zdefiniowana przez relację rekurencyjną
Słaba lokalna dyskretyzacja liniowa rozwiązania SDE (8.1) jest zdefiniowana przez relację rekurencyjną

Gdzie

z

i  _
_

Tutaj oznaczamy pochodne cząstkowe , w odniesieniu do zmiennych odpowiednio i t , odpowiednio heskiej macierzy względem i ![{\displaystyle \mathbf {G} (t)=[\mathbf {g} _{1}(t),\ldots ,\mathbf {g} _{m}(t)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/12433070ae8deb0a55bf46601f3b7c2b4c410c28) . Słaba lokalna dyskretyzacja liniowa się z kolejnością (=1,2) do rozwiązania (8.1).
. Słaba lokalna dyskretyzacja liniowa się z kolejnością (=1,2) do rozwiązania (8.1).
Lokalne schematy linearyzacji
W  od sposobu obliczania
od sposobu obliczania  uzyskać różne schematy implementacja lokalnej dyskretyzacji liniowej ogólnie nazywana schematem słabej lokalnej linearyzacji .
uzyskać różne schematy implementacja lokalnej dyskretyzacji liniowej ogólnie nazywana schematem słabej lokalnej linearyzacji .
Zamów 1 schemat WLL

gdzie dla SDE z autonomicznymi współczynnikami dyfuzji i  ,
,  i
i  to podmacierze określone przez podzieloną macierz
to podmacierze określone przez podzieloną macierz  , z
, z
![{\displaystyle {\mathcal {M}}_{n}=\left[{\begin{array}{cccc}\mathbf {f} _{\mathbf {x} }(t_{n},\mathbf {y} _{n})&\mathbf {GG} ^{\intercal }&\mathbf {f} _{t}(t_{n},\mathbf {y} _{n})&\mathbf {f} (t_{n},\mathbf {y} _{n})\\\mathbf {0} &-\mathbf {f} _{\mathbf {x} }^{\intercal }(t_{n},\mathbf {y} _{n})&\mathbf {0} &\mathbf {0} \\\mathbf {0} &\mathbf {0} &0&1\\\mathbf {0} &\mathbf {0} &0&0\end{array}}\right]\in \mathbb {R} ^{(2d+2)\times (2d+2)},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/62b6c5cb6cc2c1a036002082a4dcad32b5080660)
i  jest sekwencją d - wymiarowych niezależnych dwupunktowych wektorów losowych o rozkładzie spełniających
jest sekwencją d - wymiarowych niezależnych dwupunktowych wektorów losowych o rozkładzie spełniających  .
.
Zamów schemat 2 WLL

gdzie , i  są k z
są k z
![{\displaystyle {\mathcal {M}}_{n}=\left[{\begin{array}{cccccc}\mathbf {J} &\mathbf {H} _{2}&\mathbf {H} _{1}&\mathbf {H} _{0}&\mathbf {a} _{2}&\mathbf {a} _{1}\\\mathbf {0} &-\mathbf {J} ^{\intercal }&\mathbf {I} &\mathbf {0} &\mathbf {0} &\mathbf {0} \\\mathbf {0} &\mathbf {0} &-\mathbf {J} ^{\intercal }&\mathbf {I} &\mathbf {0} &\mathbf {0} \\\mathbf {0} &\mathbf {0} &\mathbf {0} &-\mathbf {J} ^{\intercal }&\mathbf {0} &\mathbf {0} \\\mathbf {0} &\mathbf {0} &\mathbf {0} &\mathbf {0} &0&1\\\mathbf {0} &\mathbf {0} &\mathbf {0} &\mathbf {0} &0&0\end{array}}\right]\in \mathbb {R} ^{(4d+2)\times (4d+2)},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e92d5869bcb0a0b5db4944c8170713c0c5a096a6)

I

Stabilność i dynamika
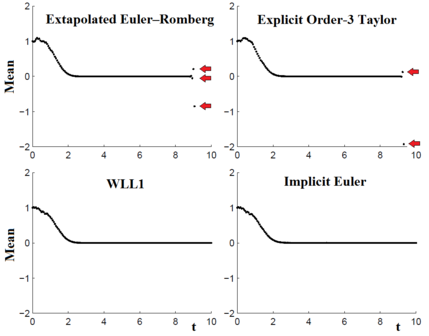
Ryc. 5 Przybliżona średnia SDE (8.2) obliczona metodą Monte Carlo ze
100 symulacjami różnych schematów z
h=1/16 i
p=q=6 .
Z założenia słabe dyskretyzacje LL dziedziczą stabilność i dynamikę liniowych SDE, ale ogólnie nie jest tak w przypadku słabych schematów LL. Schematy WLL z  pierwszych momentów średniokwadratowej, jaką może . Obejmuje to na przykład równania sprzężonych oscylatorów harmonicznych napędzanych siłą losową oraz duże układy sztywnych liniowych SDE, które wynikają z metody linii dla liniowych stochastycznych równań różniczkowych cząstkowych. Ponadto te schematy WLL zachowują ergodyczność równań liniowych i są geometrycznie ergodyczne dla niektórych klas nieliniowych SDE. Dla nieliniowych SDE z małym szumem (tj. (8.1) z ), rozwiązaniami tych schematów WLL są w zasadzie nielosowe ścieżki schematu LL (4.6) dla ODE plus małe zakłócenie związane z małym szumem. W tej sytuacji właściwości dynamiczne tego schematu deterministycznego, takie jak zachowanie linearyzacji i zachowanie dokładnej dynamiki rozwiązania wokół punktów równowagi hiperbolicznej i orbit okresowych, stają się istotne dla średniej schematu WLL. Na przykład ryc. 5 przedstawia przybliżoną średnią SDE
pierwszych momentów średniokwadratowej, jaką może . Obejmuje to na przykład równania sprzężonych oscylatorów harmonicznych napędzanych siłą losową oraz duże układy sztywnych liniowych SDE, które wynikają z metody linii dla liniowych stochastycznych równań różniczkowych cząstkowych. Ponadto te schematy WLL zachowują ergodyczność równań liniowych i są geometrycznie ergodyczne dla niektórych klas nieliniowych SDE. Dla nieliniowych SDE z małym szumem (tj. (8.1) z ), rozwiązaniami tych schematów WLL są w zasadzie nielosowe ścieżki schematu LL (4.6) dla ODE plus małe zakłócenie związane z małym szumem. W tej sytuacji właściwości dynamiczne tego schematu deterministycznego, takie jak zachowanie linearyzacji i zachowanie dokładnej dynamiki rozwiązania wokół punktów równowagi hiperbolicznej i orbit okresowych, stają się istotne dla średniej schematu WLL. Na przykład ryc. 5 przedstawia przybliżoną średnią SDE

obliczane różnymi schematami.
Notatki historyczne
Poniżej znajduje się oś czasu przedstawiająca główne zmiany metody linearyzacji lokalnej (LL).
- Pope DA (1963) wprowadza dyskretyzację LL dla ODE i schemat LL oparty na rozwinięciu Taylora.
- Ozaki T. (1985) wprowadza metodę LL do całkowania i szacowania SDE. Po raz pierwszy użyto terminu „linearyzacja lokalna”.
- Biskajski R. i in. (1996) przeformułowali metodę silnego LL dla SDE.
- Shoji I. i Ozaki T. (1997) przeformułowali metodę słabego LL dla SDE.
- Hochbrück M. i in. (1998) wprowadzają schemat LL dla ODE oparty na aproksymacji podprzestrzeni Kryłowa.
- Jimenez JC (2002) wprowadza schemat LL dla ODE i SDE oparty na racjonalnym przybliżeniu Padé.
- Carbonell FM i in. (2005) wprowadzają metodę LL dla RDE.
- Jimenez JC i in. (2006) przedstawiają metodę LL dla DDE.
- De la Cruz H. i in. (2006,2007) i Tokman M. (2006) przedstawiają dwie klasy integratorów HOLL dla ODE: oparte na integratorze i oparte na kwadraturze.
- De la Cruz H. i in. (2010) wprowadzili silną metodę HOLL dla SDE.




