Eksperymentalna analiza niepewności
Eksperymentalna analiza niepewności to technika, która analizuje wielkość pochodną w oparciu o niepewności mierzonych eksperymentalnie wielkości, które są używane w jakiejś formie zależności matematycznej („ model ”) do obliczenia tej pochodnej wielkości. Model używany do przeliczania pomiarów na wielkość pochodną jest zwykle oparty na podstawowych zasadach naukowej lub inżynierskiej .
Niepewność składa się z dwóch elementów, a mianowicie odchylenia (związanego z dokładnością ) i nieuniknionej losowej zmienności , która występuje podczas wykonywania powtarzanych pomiarów (związanej z precyzją ). Zmierzone wielkości mogą mieć odchylenia iz pewnością mają zmienność losową , więc należy się zająć tym, w jaki sposób są one „propagowane” do niepewności wielkości pochodnej. Analiza niepewności jest często nazywana „ propagacją błędu ”.
Wstęp
Na przykład eksperymentalna analiza niepewności eksperymentu w laboratorium fizyki, w którym wahadło może oszacować wartość lokalnej stałej przyspieszenia grawitacyjnego g . Odpowiednie równanie dla wyidealizowanego wahadła prostego to w przybliżeniu:
![T\,=\,2\,\pi \,\sqrt {{L \over g}} \,\,\left[ {1\,\,\, + \,\,\,{1 \over 4}\sin ^2 \left( {{\theta \over 2}} \right)\,} \right]{\mathbf{\,\,\,\,\,\,\,\,\,Eq(1)}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f4e47b914f7f78cde82f6924fe0c25a5de464dfc)
gdzie T to okres oscylacji (sekundy), L to długość (metry), a θ to kąt początkowy. Ponieważ θ jest pojedynczą zależną od czasu współrzędną tego układu, może być lepiej użyć θ 0 do oznaczenia początkowego (początkowego) kąta przemieszczenia , ale wygodniej będzie pominąć indeks dolny. Rozwiązywanie równania(1) dla stałej g ,
![\hat g\, = \,{{4\,\pi ^2 L} \over {T^2 }}\,\,\left[ {\,1\,\,\, + \,\,\,{1 \over 4}\sin ^2 \left( {{\theta \over 2}} \right)\,} \right]^2{\mathbf{\,\,\,\,\,\,\,\,\,\,\,\,Eq(2)}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a32c52196c3f2a9c14aa608a6fed3f0942f28b31)
Jest to równanie lub model, którego należy użyć do oszacowania g na podstawie zaobserwowanych danych. Fakt, że wyraz w nawiasie to tylko dwa pierwsze wyrazy rozwinięcia szeregu , będzie wprowadzany do oszacowania g z niewielkim błędem , ale w praktycznych eksperymentach błąd ten można i będzie ignorować.
Procedura polega na zmierzeniu długości wahadła L , a następnie wielokrotnym pomiarze okresu T, za każdym razem rozpoczynając ruch wahadła od tego samego początkowego kąta przemieszczenia θ. Zreplikowane pomiary T są uśredniane , a następnie wykorzystywane w równaniu (2) w celu uzyskania oszacowania g . Równanie (2) jest środkiem prowadzącym ze zmierzonych wielkości L , T i θ do wielkości pochodnej g .
Należy zauważyć, że alternatywnym podejściem byłoby przekształcenie wszystkich indywidualnych pomiarów T w oszacowania g przy użyciu równania (2), a następnie uśrednienie tych wartości g w celu uzyskania wyniku końcowego. Nie byłoby to praktyczne bez jakiejś formy zmechanizowanej zdolności obliczeniowej (tj. komputera lub kalkulatora), ponieważ ilość obliczeń numerycznych w ocenie równania (2) dla wielu T byłaby żmudna i podatna na błędy.
Systematyczna analiza błędów / uprzedzeń / wrażliwości
Wstęp
Istnieją trzy wielkości, które należy zmierzyć: (1) długość wahadła od punktu zawieszenia do środka masy „boba”; (2) okres oscylacji ; (3) początkowy kąt przemieszczenia. Zakłada się, że w tym eksperymencie długość jest stała i ma być mierzona raz, chociaż można by wykonać powtórne pomiary, a wyniki uśrednić.
Początkowy kąt przemieszczenia musi być ustalony dla każdego powtórzonego pomiaru okresu T i przyjmuje się, że kąt ten jest stały. Często kąt początkowy jest mały (mniej niż około 10 stopni), tak że poprawkę dla tego kąta uważa się za nieistotną; tj. termin w nawiasach w równaniu (2) jest traktowany jako jedność. Jednak w przypadku badanego tutaj eksperymentu ta poprawka jest interesująca, więc typowa wartość początkowego przemieszczenia może wynosić od 30 do 45 stopni.
Załóżmy, że zdarzyło się, o czym nie wiedzieli uczniowie, że pomiary długości były za małe, powiedzmy, o 5 mm. Może to być spowodowane wadliwym urządzeniem pomiarowym (np. miarką) lub, co bardziej prawdopodobne, błędem systematycznym w użyciu tego urządzenia do pomiaru L . Mogłoby się to zdarzyć, gdyby uczniowie zapomnieli zmierzyć środek masy boba i zamiast tego konsekwentnie mierzyli do punktu, w którym przymocowana była do niego nić. Zatem ten błąd nie jest przypadkowy; występuje za każdym razem, gdy mierzona jest długość.
Następnie okres oscylacji T może być obarczony błędem systematycznym , jeśli na przykład uczniowie konsekwentnie błędnie liczą ruchy wahadła tam iz powrotem, aby uzyskać całkowitą liczbę cykli. (Często procedura eksperymentalna wymaga odmierzania czasu w kilku cyklach, np. pięciu lub dziesięciu, a nie tylko jednego.) A może cyfrowy stoper, którego używali, miał problem z elektroniką i konsekwentnie odczytywał zbyt dużą wartość, powiedzmy, 0,02 sekundy. Będą oczywiście również losowe zmiany w czasie; ta kwestia zostanie omówiona później. Niepokojący jest tutaj spójny, systematyczny, nieprzypadkowy błąd pomiaru okresu oscylacji wahadła.
Wreszcie kąt początkowy można było zmierzyć za pomocą prostego kątomierza . Trudno jest ustawić i odczytać początkowy kąt z dużą dokładnością (lub precyzją, jeśli o to chodzi; ten pomiar ma słabą powtarzalność ). Załóżmy, że uczniowie konsekwentnie źle ustawiają kątomierz, tak że odczyt kąta jest za mały, powiedzmy, o 5 stopni. Następnie wszystkie początkowe pomiary kąta są obciążone tą wartością.
Błędy czułości
Jednak uprzedzenia nie są znane podczas trwania eksperymentu . Jeśli na przykład wiadomo było, że pomiary długości są zaniżone o 5 mm, uczniowie mogli albo poprawić swój błąd pomiarowy, albo dodać 5 mm do swoich danych, aby usunąć błąd. Większą wartość ma raczej zbadanie skutków nielosowych, systematycznych możliwości popełnienia błędu przed przeprowadzeniem eksperymentu. Jest to forma analizy wrażliwości .
Chodzi o to, aby oszacować różnicę lub zmianę ułamkową , w wyprowadzonej wielkości, tutaj g , biorąc pod uwagę, że mierzone wielkości są obciążone pewną określoną wielkością. Na przykład, gdyby kąt początkowy był stale mniejszy o 5 stopni, jaki wpływ miałoby to na szacowane g ? Jeśli długość jest stale mniejsza o 5 mm, jaka jest zmiana oszacowania g ? Jeśli pomiary okresu są stale za długie o 0,02 sekundy, o ile zmieni się szacowane g ? Co stanie się z oszacowaniem g , jeśli te odchylenia wystąpią w różnych kombinacjach?
Jednym z powodów zgłębiania tych zagadnień jest fakt, że projekt eksperymentu , w sensie tego, jakiego sprzętu i procedury należy użyć (a nie w sensie statystycznym , o którym mowa później), zależy od względnego efektu błędów systematycznych w mierzonych wielkościach. Jeśli odchylenie początkowego kąta o 5 stopni spowodowałoby niedopuszczalną zmianę oszacowania g , być może należy opracować bardziej skomplikowaną i dokładną metodę tego pomiaru. Z drugiej strony, jeśli przed przeprowadzeniem eksperymentu można wykazać, że kąt ten ma znikomy wpływ na g , to użycie kątomierza jest dopuszczalne.
Inna motywacja dla tej formy analizy wrażliwości pojawia się po przeprowadzeniu eksperymentu, a analiza danych wykazuje błąd w oszacowaniu g . Zbadanie zmiany g , która może wynikać z odchyleń w kilku parametrach wejściowych , tj. zmierzonych wielkościach, może prowadzić do wglądu w przyczyny odchyleń oszacowania g . Analiza ta może pomóc w wyizolowaniu takich problemów, jak błędy pomiarowe, problemy z aparaturą, błędne założenia dotyczące modelu itp.
Bezpośrednie (dokładne) obliczenie odchylenia
Najprostszym, żeby nie powiedzieć oczywistym sposobem podejścia do tego byłoby bezpośrednie obliczenie zmiany przy użyciu równania (2) dwa razy, raz z teoretycznymi wartościami obciążonymi i ponownie z prawdziwymi, nieobciążonymi wartościami parametrów:

gdzie Δ L itd. reprezentują odchylenia w odpowiednich mierzonych wielkościach. (Karat nad g oznacza szacunkową wartość g ). Aby uczynić to bardziej konkretnym, rozważmy wyidealizowane wahadło o długości 0,5 metra i początkowym kącie przemieszczenia równym 30 stopni; z równania (1) okres wyniesie wtedy 1,443 sekundy. Załóżmy, że odchylenia wynoszą −5 mm, −5 stopni i +0,02 sekundy odpowiednio dla L , θ i T . Następnie, biorąc najpierw pod uwagę tylko samo odchylenie długości Δ L ,

a dla tego i innych parametrów pomiarowych T i θ zmiany w g są zapisane w Tabeli 1 .
Powszechną praktyką w analizie wrażliwości jest wyrażanie zmian jako ułamki (lub procenty). Wtedy dokładna ułamkowa zmiana w g wynosi

Wyniki tych obliczeń dla przykładowego układu wahadłowego zestawiono w tabeli 1.
aproksymacja zlinearyzowana; wstęp
Następnie załóżmy, że niepraktyczne jest zastosowanie podejścia bezpośredniego do znalezienia zależności wielkości pochodnej ( g ) od wejściowych, mierzonych parametrów ( L, T, θ ). Czy istnieje alternatywna metoda? przydatna jest tutaj koncepcja różnicy całkowitej :

gdzie z jest pewną funkcją kilku ( p ) zmiennych x . Symbol ∂ z / ∂x 1 reprezentuje „ pochodną cząstkową ” funkcji z względem jednej z kilku zmiennych x wpływających na z . W tym celu znalezienie tej pochodnej polega na utrzymywaniu na stałym poziomie wszystkich zmiennych innych niż ta, w odniesieniu do której znajduje się pochodna cząstkowa, a następnie znalezieniu pierwszej pochodnej w zwykły sposób (co może i często wiąże się z regułą łańcuchową ). W funkcjach, które obejmują kąty, tak jak w równaniu (2), kąty muszą być mierzone w radianach .
Równanie(5) jest funkcją liniową , która przybliża np. krzywą w dwóch wymiarach ( p = 1) linią styczną w punkcie na tej krzywej lub w trzech wymiarach ( p = 2) przybliża powierzchnię styczną płaszczyźnie w punkcie na tej powierzchni. Pomysł polega na tym, że całkowitą zmianę z w bliskim sąsiedztwie określonego punktu można znaleźć na podstawie równania (5). W praktyce zamiast różnic stosuje się skończone różnice, tak że

i działa to bardzo dobrze, o ile przyrosty Δ x są wystarczająco małe. Nawet wysoce zakrzywione funkcje są prawie liniowe na wystarczająco małym obszarze. Ułamkowa zmiana jest wtedy

Alternatywny, użyteczny sposób zapisania równania (6) wykorzystuje formalizm wektorowo-macierzowy:

Przy stosowaniu tych pochodnych cząstkowych zauważ, że są to funkcje, które będą oceniane w punkcie , to znaczy, że wszystkie parametry pojawiające się w pochodnych cząstkowych będą miały wartości liczbowe. Zatem iloczyn wektorowy w równaniu (8), na przykład, da pojedynczą wartość liczbową. W przypadku badań obciążenia wartości użyte w częściach składowych są prawdziwymi wartościami parametrów, ponieważ przybliżamy funkcję z w małym obszarze w pobliżu tych prawdziwych wartości.
aproksymacja zlinearyzowana; absolutny przykład zmiany
Wracając do przykładu wahadła i stosując te równania, bezwzględna zmiana oszacowania g wynosi

a teraz zadaniem jest znalezienie pochodnych cząstkowych w tym równaniu. Znacznie uprości to proces definiowania
![\alpha (\theta )\,\, \equiv \,\,\left[ {\,1\,\,\, + \,\,\,{1 \over 4}\sin ^2 \left( {{\theta \over 2}} \right)\,} \right]^2](https://wikimedia.org/api/rest_v1/media/math/render/svg/9442b19b90855254400405aa0f8d49a3c13c4f23)
Przepisanie Eq(2) i uwzględnienie części składowych,

Podstawiając te pochodne do równania (9),
![\Delta \hat g\,\,\, \approx \,\,\,\left[ {{{4\,\pi ^2 } \over {T^2 }}\alpha (\theta )} \right]\,\Delta L\,\,\,\,\, + \,\,\,\,\,\,\left[ {{{ - 8\,L\,\pi ^2 } \over {T^3 }}\alpha (\theta )} \right]\Delta T\,\,\, + \,\,\,\,\left[ {{{L\,\pi ^2 } \over {T^2 }}\,\,\sqrt {\alpha (\theta )} \,\,\sin (\theta )} \right]\Delta \theta{\mathbf{\,\,\,\,\,\,\,\,Eq(11)}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/02823c17786061a3bf52e1ed94692df783d712bf)
a następnie stosując te same wartości liczbowe dla parametrów i ich odchyleń, jak poprzednio, otrzymuje się wyniki w tabeli 1. Wartości są dość zbliżone do wartości znalezionych przy użyciu równania (3), ale nie są dokładne, z wyjątkiem L . To dlatego, że zmiana g jest liniowa względem L , co można wywnioskować z faktu, że pochodna cząstkowa względem (wrt) L nie zależy od L . Zatem liniowe „przybliżenie” okazuje się być dokładne dla L . Częściowy wrt θ jest bardziej skomplikowany i wynika z zastosowania reguły łańcuchowej do α . Używając równania (10) w równaniu (9) należy również zauważyć, że miary kątów, w tym Δ θ , muszą zostać zamienione ze stopni na radiany.
aproksymacja zlinearyzowana; przykład zmiany ułamkowej
Ułamkowa zmiana oszacowania g w przybliżeniu zlinearyzowanym wynosi, stosując równanie (7) do przykładu wahadła,

co wygląda na bardzo skomplikowane, ale w praktyce zwykle prowadzi to do prostej zależności dla zmiany ułamkowej. Zatem,
![{{\Delta \hat g} \over {\hat g}}\,\,\, \approx \,\,\,\left[ {{{{{4\,\pi ^2 } \over {T^2 }}\alpha (\theta )} \over {{{4\,\pi ^2 L} \over {T^2 }}\alpha (\theta )}}} \right]\,\Delta L\,\,\,\,\, + \,\,\,\,\,\,\left[ {{{{{ - 8\,L\,\pi ^2 } \over {T^3 }}\alpha (\theta )} \over {{{4\,\pi ^2 L} \over {T^2 }}\alpha (\theta )}}} \right]\Delta T\,\,\, + \,\,\,\,\left[ {{{{{L\,\pi ^2 } \over {T^2 }}\,\,\sqrt {\alpha (\theta )} \,\,\sin (\theta )} \over {{{4\,\pi ^2 L} \over {T^2 }}\alpha (\theta )}}} \right]\Delta \theta](https://wikimedia.org/api/rest_v1/media/math/render/svg/13b24cb473f258483687f001edce16d156a9f0c5)
co zmniejsza się do

To, z wyjątkiem ostatniego wyrazu, jest niezwykle prostym wynikiem. Rozszerzając ostatni wyraz jako szereg w θ ,
![{{\sin (\theta )} \over {4\left[ {1\,\,\, + \,\,\,{1 \over 4}\sin ^2 \left( {{\theta \over 2}} \right)} \right]}}\,\,\, \approx \,\,\,{\theta \over 4}\,\,\,\,\,\,\,\,\,\,\, \Rightarrow \,\,\,\,\,\,\,\,{\theta \over 4}\,\,\Delta \theta \,\,\, = \,\,\,{{\theta ^2 } \over 4}{{\Delta \theta } \over \theta }](https://wikimedia.org/api/rest_v1/media/math/render/svg/f5edc067a2e0d7f6ed66c3d715342e83f4545882)
więc wynik dla linearyzowanego przybliżenia dla ułamkowej zmiany oszacowania g wynosi

Pamiętając, że kąty są mierzone w radianach , a wartość użyta w przykładzie to 30 stopni, jest to około 0,524 radianów; przepołowiony i podniesiony do kwadratu, jak mówi współczynnik ułamkowej zmiany θ , współczynnik ten wynosi około 0,07. Z równania (12) można łatwo wywnioskować, że najbardziej lub najmniej wpływowymi parametrami są T, L, θ. Innym sposobem wyrażenia tego jest to, że wielkość pochodna g jest bardziej wrażliwa na np. wielkość mierzoną T niż na L lub θ . Podstawiając wartości liczbowe z przykładu, wyniki przedstawiono w tabeli 1 i zgadzają się dość dobrze z wynikami uzyskanymi przy użyciu równania (4).
Postać równania Eq(12) jest zwykle celem analizy wrażliwości, ponieważ jest ogólna, tj. niezwiązana z określonym zestawem wartości parametrów, jak to miało miejsce w przypadku metody bezpośredniego obliczania równania (3) lub ( 4) i zasadniczo jasne jest, po sprawdzeniu, które parametry mają największy wpływ, jeśli zawierają błędy systematyczne. Na przykład, jeśli pomiar długości L był wyższy o dziesięć procent, oszacowanie g również byłoby wyższe o dziesięć procent. Jeśli okres T byłby niedoszacowany o 20 procent, to oszacowanie g byłoby przeszacowane o 40 procent (zwróć uwagę na ujemny znak dla terminu T ). Gdyby początkowy kąt θ został przeszacowany o dziesięć procent, oszacowanie g byłoby przeszacowane o około 0,7 procent.
Ta informacja jest bardzo cenna w analizie danych poeksperymentalnych, aby wyśledzić, które pomiary mogły przyczynić się do zaobserwowanego odchylenia w ogólnym wyniku (oszacowanie g ). Kąt, na przykład, mógłby zostać szybko wyeliminowany jako jedyne źródło odchylenia w g , powiedzmy, 10 procent. Kąt musiałby być błędny o około 140 procent, co, jak można mieć nadzieję, nie jest fizycznie prawdopodobne.
Tabela wyników
| Nominalny | Stronniczość | Stosunek | Dokładna Δg | Liniowy Δg | Dokładne Δg/g | Liniowy Δg/g | |
| Długość L | 0,5 metra | − 0,005m | 0,010 | − 0,098 | − 0,098 | − 0,010 | − 0,010 |
| Okres T | 1,443 sek | +0,02 sek | 0,014 | − 0,266 | − 0,272 | − 0,027 | − 0,028 |
| Kąt θ | 30 st | − 5 st | 0,17 | − 0,0968 | − 0,105 | − 0,01 | − 0,011 |
| Wszystko | −0,455 | − 0,475 | − 0,046 | − 0,049 | |||
| Równanie(3) | Równanie(11) | Równanie(4) | Równanie(12) |
Losowy błąd / precyzja
Wstęp
Następnie weź pod uwagę fakt, że ponieważ uczniowie wielokrotnie mierzą okres oscylacji wahadła, uzyskają różne wartości dla każdego pomiaru. Te fluktuacje są przypadkowe - małe różnice w czasie reakcji podczas obsługi stopera, różnice w szacowaniu, kiedy wahadło osiągnęło swój maksymalny ruch kątowy i tak dalej; wszystkie te rzeczy oddziałują na siebie, powodując zmiany w mierzonej wielkości. To nie jest błąd systematyczny, który omówiono powyżej, gdzie zakładano, że istnieje różnica 0,02 sekundy między odczytem stopera a rzeczywistym okresem T . Odchylenie jest stałą, stałą wartością; losowa zmienność jest właśnie taka – przypadkowa, nieprzewidywalna.
Losowe zmiany nie są przewidywalne, ale mają tendencję do przestrzegania pewnych zasad, a reguły te są zwykle podsumowywane przez konstrukcję matematyczną zwaną funkcją gęstości prawdopodobieństwa (PDF). Ta funkcja z kolei ma kilka parametrów, które są bardzo przydatne w opisie zmienności obserwowanych pomiarów. Dwa takie parametry to średnia i wariancja pliku PDF. Zasadniczo średnia to położenie pliku PDF na osi liczb rzeczywistych, a wariancja to opis rozproszenia, rozproszenia lub szerokości pliku PDF.
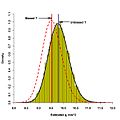
Aby to zilustrować, rysunek 1 przedstawia tak zwany normalny PDF , który zostanie przyjęty jako rozkład obserwowanych okresów czasu w eksperymencie wahadłowym. Ignorując na razie wszystkie odchylenia w pomiarach, średnia tego PDF będzie równa prawdziwej wartości T dla wyidealizowanego wahadła o długości 0,5 metra, które ma początkowy kąt 30 stopni, a mianowicie z równania (1), 1,443 sekundy. Na rysunku znajduje się 10000 symulowanych pomiarów na histogramie (który sortuje dane w przedziały o małej szerokości, aby pokazać kształt rozkładu), a normalny plik PDF jest linią ciągłą. Linia pionowa to średnia.
Interesującym zagadnieniem związanym z losowymi fluktuacjami jest wariancja. Dodatni pierwiastek kwadratowy z wariancji jest definiowany jako odchylenie standardowe i jest miarą szerokości pliku PDF; istnieją inne miary, ale odchylenie standardowe, symbolizowane grecką literą σ „sigma”, jest zdecydowanie najczęściej używane. Do tej symulacji zastosowano sigma 0,03 sekundy dla pomiarów T ; pomiary L i θ zakładały pomijalną zmienność.
Na rysunku szerokości jednej, dwóch i trzech sigma są oznaczone pionowymi liniami przerywanymi ze strzałkami. Widać, że szerokość trzech sigma po obu stronach średniej zawiera prawie wszystkie dane dla normalnego pliku PDF. Obserwowany zakres wartości czasu wynosi od około 1,35 do 1,55 sekundy, ale większość z tych pomiarów czasu mieści się w przedziale węższym.
Plik PDF z ilością pochodną
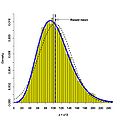
Na rysunku 1 przedstawiono wyniki pomiarów dla wielu powtarzanych pomiarów okresu wahadła T . Załóżmy, że te pomiary zostały użyte pojedynczo w równaniu (2) do oszacowania g . Jaki byłby plik PDF tych g ? Mając ten plik PDF, jaka jest średnia i wariancja oszacowań g ? Odpowiedź na to pytanie nie jest łatwa, więc symulacja będzie najlepszym sposobem, aby zobaczyć, co się stanie. Na rysunku 2 ponownie przedstawiono 10000 pomiarów T , które są następnie wykorzystywane w równaniu (2) do oszacowania g, a te 10000 oszacowań umieszcza się na histogramie. Średnia (pionowa czarna linia) ściśle zgadza się ze znaną wartością g wynoszącą 9,8 m/ s2 .
Czasami możliwe jest uzyskanie rzeczywistego pliku PDF przekształconych danych. W przykładzie z wahadłem pomiary czasu T są w równaniu (2) podniesione do kwadratu i podzielone na pewne czynniki, które na razie można uważać za stałe. Korzystając z reguł transformacji zmiennych losowych, można wykazać, że jeśli T mają rozkład normalny, jak na rysunku 1, to oszacowania g mają inny (skomplikowany) rozkład, który można wyprowadzić analitycznie. To g -PDF jest wykreślone z histogramem (czarna linia) i zgodność z danymi jest bardzo dobra. Na rycinie 2 pokazano również g -PDF (czerwona linia przerywana) dla odchylonych wartości T , które zostały użyte w poprzednim omówieniu odchylenia. Zatem średnia obciążonego Tg -PDF wynosi 9,800 - 0,266 m/s2 ( patrz Tabela 1).
Rozważmy ponownie, tak jak to zrobiono w powyższej dyskusji na temat stronniczości, funkcję

gdzie f nie musi być i często nie jest liniowe, a x to zmienne losowe, które na ogół nie muszą mieć rozkładu normalnego i które na ogół mogą być ze sobą skorelowane. W analizie wyników eksperymentu interesująca jest średnia i wariancja wyprowadzonej wielkości z, która będzie zmienną losową . Są one zdefiniowane jako wartości oczekiwane
![\mu _z \,\, = \,\,\,{\rm E}\,[z]\,\,\,\,\,\,\,\,\,\,\,\,\,\,\sigma _z^2 \,\,\, = \,\,\,{\rm E}\,\left[ {\left( {z\,\, - \,\,\mu _z } \right)^2 } \right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/b0ee3e7a3fa0bf5c367e932c694e11877236d164)
tj. pierwszy moment pliku PDF o pochodzeniu i drugi moment pliku PDF o średniej pochodnej zmiennej losowej z . Te oczekiwane wartości znajdują się za pomocą całki dla rozważanych tutaj zmiennych ciągłych. Jednak do obliczenia tych całek potrzebna jest funkcjonalna postać PDF wielkości pochodnej z . Zauważono, że
- Dokładne obliczenie [wariancji] nieliniowych funkcji zmiennych, które są obarczone błędem, jest na ogół problemem o dużej złożoności matematycznej. W rzeczywistości znaczna część statystyki matematycznej dotyczy ogólnego problemu wyprowadzenia pełnego rozkładu częstotliwości [PDF] takich funkcji, z którego następnie można wyprowadzić [wariancję].
Aby to zilustrować, prostym przykładem tego procesu jest znalezienie średniej i wariancji wyprowadzonej wielkości z = x 2 , gdzie mierzona wielkość x ma rozkład normalny ze średnią μ i wariancją σ 2 . Wyprowadzona wielkość z będzie miała nowy plik PDF, który można (czasami) znaleźć za pomocą reguł rachunku prawdopodobieństwa. W takim przypadku można pokazać za pomocą tych reguł, że PDF z z będzie
![{\rm PDF}_z \,\,\, \sim \,\,\,{1 \over {2\sqrt z }}\,\,\,{1 \over {\sqrt {2\pi } \,\,\sigma }}\left[ {\exp \left( { - \,\,{{\left( {\sqrt z - \mu } \right)^2 } \over {2\,\sigma ^2 }}} \right)\,\,\, + \,\,\,\exp \left( { - \,\,{{\left( { - \sqrt z - \mu } \right)^2 } \over {2\,\sigma ^2 }}} \right)} \right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/fc1260784cd4627ae01c36cef768c7de50a3b72c)
Całkowanie tego od zera do dodatniej nieskończoności zwraca jedność, co potwierdza, że jest to plik PDF. Następnie potrzebna jest średnia i wariancja tego pliku PDF, aby scharakteryzować pochodną wielkość z . Średnia i wariancja (właściwie błąd średniokwadratowy , rozróżnienie, które nie będzie tutaj omawiane) są obliczane z całek

czy te funkcje są w ogóle całkowalne . Jak to w tym przypadku bywa, wyniki analityczne są możliwe i okazuje się, że

Te wyniki są dokładne. Zauważ, że średnia (oczekiwana wartość) z nie jest tym, czego można by logicznie oczekiwać, tj. po prostu kwadratem średniej z x . Tak więc, nawet przy użyciu prawdopodobnie najprostszej funkcji nieliniowej, kwadratu zmiennej losowej, proces znajdowania średniej i wariancji wyprowadzonej wielkości jest trudny, a dla bardziej skomplikowanych funkcji można śmiało powiedzieć, że ten proces nie jest praktyczny dla eksperymentalna analiza danych.
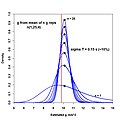
Zgodnie z dobrą praktyką w tych badaniach powyższe wyniki można sprawdzić za pomocą symulacji. Figura 3 przedstawia histogram 10000 próbek z , z podanym powyżej plikiem PDF również przedstawionym na wykresie; umowa jest doskonała. W tej symulacji x miały średnią 10 i odchylenie standardowe 2. Tak więc naiwna wartość oczekiwana dla z wynosiłaby oczywiście 100. Linię pionową „obciążonej średniej” można znaleźć za pomocą powyższego wyrażenia dla μ z i to dobrze zgadza się z zaobserwowaną średnią (tj. obliczoną na podstawie danych; przerywana linia pionowa), a średnia odchylona jest powyżej „oczekiwanej” wartości 100. Przerywana krzywa pokazana na tym rysunku to normalny plik PDF, o którym mowa później.
Zlinearyzowane przybliżenia średniej i wariancji wyprowadzonej ilości
Jeśli, jak to zwykle bywa, nie znaleziono pliku PDF wielkości pochodnej, a nawet jeśli pliki PDF wielkości mierzonych nie są znane, okazuje się, że nadal możliwe jest oszacowanie średniej i wariancji (a tym samym , odchylenie standardowe) wielkości pochodnej. Ta tak zwana „metoda różnicowa” zostanie opisana poniżej. (Aby uzyskać informacje na temat wyprowadzenia równań (13) i (14), zobacz tę sekcję poniżej.)
Jak zwykle w matematyce stosowanej, jednym ze sposobów uniknięcia złożoności jest przybliżenie funkcji inną, prostszą funkcją, i często odbywa się to za pomocą rozwinięcia szeregu Taylora niskiego rzędu . Można pokazać, że jeśli funkcja z zostanie zastąpiona rozwinięciem pierwszego rzędu wokół punktu określonego przez średnie wartości każdej ze zmiennych p x , wariancja zlinearyzowanej funkcji jest aproksymowana przez

gdzie σ ij reprezentuje kowariancję dwóch zmiennych x i oraz x j . Podwójna suma jest przejmowana przez wszystkie kombinacje i oraz j , przy założeniu, że kowariancja zmiennej z samą sobą jest wariancją tej zmiennej, to znaczy σ ii = σ i 2 . Ponadto kowariancje są symetryczne, więc σ ij = σ ji . Ponownie, podobnie jak w przypadku obliczeń obciążenia, pochodne cząstkowe są oceniane w określonym punkcie, w tym przypadku według średniej (średniej) wartości lub innego najlepszego oszacowania każdej ze zmiennych niezależnych. Zauważ, że jeśli f jest liniowe wtedy i tylko wtedy , równanie (13) jest dokładne.
Oczekiwaną wartość (średnią) wyprowadzonego pliku PDF można oszacować w przypadku, gdy z jest funkcją jednej lub dwóch mierzonych zmiennych, używając

gdzie częściowe są oceniane na podstawie średniej odpowiedniej zmiennej pomiarowej. (Dla więcej niż dwóch zmiennych wejściowych to równanie jest rozszerzone, włączając różne mieszane składowe).
Wracając do prostego przykładowego przypadku z = x 2 , średnia jest szacowana przez
![\mu _z \,\, \approx \,\,\mu ^2 \,\, + \,\,\,{1 \over 2}\,\,\sigma ^2 \,\,{{\partial ^2 z} \over {\partial x^2 }}\,\,\, = \,\,\,\mu ^2 + \,\,\,{1 \over 2}\,\,\sigma ^2 \,\,\left[ 2 \right]\,\,\,\, = \,\,\,\mu ^2 + \,\sigma ^2](https://wikimedia.org/api/rest_v1/media/math/render/svg/5722497c5a78218aaa5c32e2a30d07583489b4c1)
co jest tym samym, co dokładny wynik w tym konkretnym przypadku. Dla wariancji (właściwie MS e ),

który różni się tylko brakiem ostatniego wyrazu, który był w dokładnym wyniku; ponieważ σ powinno być małe w porównaniu z μ , nie powinno to stanowić większego problemu.
Na rycinie 3 pokazano normalny plik PDF (linie przerywane) ze średnią i odchyleniami od tych przybliżeń. Normalny plik PDF nie opisuje tych danych pochodnych szczególnie dobrze, zwłaszcza w dolnej części. Zastępując znaną średnią (10) i wariancję (4) wartości x w tej symulacji lub w powyższych wyrażeniach, widać, że przybliżone (1600) i dokładne (1632) wariancje różnią się tylko nieznacznie (2%).
Macierzowy format aproksymacji wariancji
Bardziej eleganckim sposobem zapisania tak zwanego równania wariancji „propagacji błędu” jest użycie macierzy . Najpierw zdefiniuj wektor pochodnych cząstkowych, tak jak w powyższym równaniu (8):

gdzie indeks górny T oznacza transpozycję macierzy; następnie zdefiniuj macierz kowariancji

Propagację błędu aproksymacji można zatem zapisać zwięźle jako postać kwadratową

Jeśli wszystkie korelacje między zmiennymi p wynoszą zero, jak się często zakłada, wówczas macierz kowariancji C staje się diagonalna, z indywidualnymi wariancjami wzdłuż głównej przekątnej. Aby jeszcze raz podkreślić ten punkt, wszystkie częściowe wartości wektora γ są oceniane w określonym punkcie, tak więc równanie (15) zwraca pojedynczy wynik liczbowy.
Przydatne będzie szczegółowe rozpisanie wyrażenia na wariancję za pomocą równania (13) lub (15) dla przypadku p = 2. Prowadzi to do

co, ponieważ dwa ostatnie terminy powyżej są tym samym, jest

Przybliżenie liniowe: prosty przykład wariancji
Rozważmy stosunkowo prosty przykład algebraiczny, zanim powrócimy do bardziej skomplikowanego przykładu wahadła. Pozwalać

aby

To wyrażenie mogłoby pozostać w tej postaci, ale powszechną praktyką jest dzielenie przez z 2 , ponieważ spowoduje to anulowanie wielu czynników, a także da bardziej użyteczny wynik:

co zmniejsza się do

Ponieważ odchylenie standardowe z jest zwykle interesujące, jego oszacowanie jest

gdzie użycie średnich (średnich) zmiennych jest zaznaczone kreskami, a karaty wskazują, że należy również oszacować (ko)wariancje składowe, chyba że istnieje solidna wiedza a priori na ich temat. Generalnie tak nie jest, więc estymatorzy

są często używane, oparte na n obserwacjach (pomiarach).
Przybliżenie linearyzowane: przykład wahadła, średnia
Dla uproszczenia rozważmy tylko zmierzony czas jako zmienną losową, tak aby wielkość pochodna, oszacowanie g , wynosiła

gdzie k zbiera czynniki w równaniu (2), które w danej chwili są stałymi. Ponownie stosując zasady rachunku prawdopodobieństwa, można wyprowadzić plik PDF dla oszacowań g (ten plik PDF został przedstawiony na rysunku 2). W tym przypadku, w przeciwieństwie do przykładu użytego wcześniej, nie można było znaleźć analitycznie średniej i wariancji. Nie pozostaje więc nic innego, jak skorzystać z przybliżeń linearyzowanych. Dla średniej, korzystając z równania (14), z uproszczonym równaniem oszacowania g ,

Wtedy oczekiwana wartość szacowanego g będzie wynosić
![{\rm E}[\hat g]\,\,\, = \,\,\,{k \over {\mu _T^2}}\,\,\, + \,\,\,{1 \over 2}\left( {{{6\,k} \over {\mu _T^4 }}} \right)\sigma _T^2{\mathbf{\,\,\,\,\,\,\,\,\,\,\,\,\,\,Eq(16)}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b448eee92fed12848777080e2be58c6f979864d1)
gdzie, jeśli okres wahadła razy T są nieobciążone, pierwszy wyraz wynosi 9,80 m/s 2 . Ten wynik mówi, że średnia oszacowanych g jest obciążona wysoko. Zostanie to sprawdzone za pomocą symulacji poniżej.
Przybliżenie linearyzowane: przykład wahadła, wariancja
Następnie, aby znaleźć oszacowanie wariancji dla przykładu wahadła, ponieważ pochodne cząstkowe zostały już znalezione w równaniu (10), wszystkie zmienne powrócą do problemu. Ułamki cząstkowe przechodzą do wektora γ . Zgodnie ze zwykłą praktyką, zwłaszcza jeśli nie ma dowodów przeciwnych, zakłada się, że wszystkie kowariancje są zerowe, więc C jest przekątną. Następnie

Ten sam wynik uzyskuje się za pomocą równania (13). Należy podkreślić, że te „sigmy” to wariancje opisujące losową zmienność pomiarów L , T i θ ; nie należy ich mylić z uprzedzeniami używanymi wcześniej. Wariancje (lub odchylenia standardowe) i odchylenia to nie to samo .
Aby zilustrować to obliczenie, rozważmy wyniki symulacji z rysunku 2. Tutaj zakładano, że tylko pomiar czasu ma zmienność losową, a zastosowane do tego odchylenie standardowe wynosiło 0,03 sekundy. Zatem, korzystając z równania (17),

i używając wartości liczbowych przypisanych wcześniej dla tego przykładu,

co korzystnie wypada w porównaniu z obserwowaną wariancją 0,171, obliczoną przez program symulacyjny. (Szacowane wariancje charakteryzują się znaczną zmiennością i nie oczekuje się, że wartości te będą się dokładnie zgadzać.) Dla wartości średniej, równanie (16) daje odchylenie jedynie około 0,01 m/s 2 , czego nie widać na rysunku 2 .
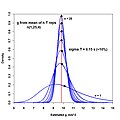
Aby wyjaśnić, co się dzieje, gdy błąd przypadkowy w zmiennej pomiarowej wzrasta, rozważmy rysunek 4, na którym odchylenie standardowe pomiarów czasu zwiększa się do 0,15 s, czyli około dziesięciu procent. Plik PDF dla oszacowanych g jest również przedstawiony na wykresie, tak jak na rysunku 2; zauważ, że plik PDF dla przypadku większej zmienności w czasie jest przekrzywiony, a teraz wyraźnie widoczna jest obciążona średnia. Przybliżona (obciążona) średnia i średnia obserwowana bezpośrednio z danych dobrze się zgadzają. Krzywa przerywana to normalny plik PDF ze średnią i odchyleniem od przybliżeń; nie reprezentuje danych szczególnie dobrze.
Przybliżenie liniowe: przykład wahadła, błąd względny (precyzja)
Zamiast wariancji, często bardziej użyteczną miarą jest odchylenie standardowe σ , a dzieląc je przez średnią μ otrzymujemy wielkość zwaną błędem względnym lub współczynnikiem zmienności . Jest to miara dokładności :

W przypadku wahadła daje to dokładność nieco ponad 4 procent. Podobnie jak w przypadku odchylenia, przydatne jest powiązanie błędu względnego w wielkości wyprowadzonej z błędem względnym w wielkościach mierzonych. Podziel równanie(17) przez kwadrat g :

i wykorzystaj wyniki otrzymane z obliczeń odchylenia zmiany ułamkowej, aby otrzymać (porównaj z równaniem (12)):

Biorąc pierwiastek kwadratowy, otrzymujemy RE:

W przykładowym przypadku to daje

co zgadza się z RE uzyskanym wcześniej. Ta metoda, wykorzystująca względne błędy w składowych (mierzonych) wielkościach, jest prostsza, gdy matematyka zostanie wykonana w celu uzyskania relacji takiej jak Równanie (17). Przypomnijmy, że kąty użyte w równaniu (17) muszą być wyrażone w radianach.
Jeśli, jak to często bywa, samo odchylenie standardowe estymowanej g powinno być potrzebne, można je łatwo uzyskać przez proste przekształcenie równania (18). To odchylenie standardowe jest zwykle podawane wraz z „oszacowaniem punktowym” wartości średniej: dla symulacji byłoby to 9,81 ± 0,41 m/s 2 . Co należy wywnioskować z podanych w ten sposób przedziałów czasowych, należy bardzo dokładnie rozważyć. Omówienie tego ważnego tematu wykracza poza zakres tego artykułu, ale kwestia ta została szczegółowo omówiona w książce Natrelli.
Przybliżenie linearyzowane: przykład wahadła, sprawdzenie symulacji
Dobrą praktyką jest sprawdzanie obliczeń niepewności za pomocą symulacji . Obliczenia te mogą być bardzo skomplikowane i łatwo popełnić błędy. Na przykład, aby sprawdzić, czy błąd względny tylko dla pomiaru kąta był prawidłowy, utworzono symulację próbkowania kątów z normalnego pliku PDF ze średnią 30 stopni i odchyleniem standardowym 5 stopni; oba są konwertowane na radiany w symulacji. Względny błąd kąta wynosi wtedy około 17 procent. Z równania (18) względny błąd oszacowanego g wynosi, utrzymując inne pomiary przy pomijalnej zmienności,

Symulacja pokazuje, że zaobserwowany błąd względny w g wynosi około 0,011, co pokazuje, że obliczenia niepewności kąta są prawidłowe. Tak więc, jak widać przy obliczeniach odchylenia, stosunkowo duża losowa zmiana kąta początkowego (17 procent) powoduje jedynie około jednego procenta względnego błędu oszacowania g .
Rysunek 5 przedstawia histogram dla tych oszacowań g . Ponieważ względny błąd kąta był stosunkowo duży, PDF oszacowań g jest przekrzywiony (nie normalny, niesymetryczny), a średnia jest nieco obciążona. W tym przypadku PDF nie jest znany, ale nadal można oszacować średnią za pomocą równania (14). Można pokazać, że druga część częściowa dla części kątowej równania Eq(2), utrzymująca inne zmienne jako stałe, zebrana w k , jest
![{{\partial ^2 \hat g} \over {\partial \theta ^2 }}\,\,\, = \,\,\,{k \over {32}}\left[ {9\cos \left( {\mu _\theta } \right)\,\,\, - \,\,\,\cos \left( {2\mu _\theta } \right)} \right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a75c40a57ee98cee8f29efca1bbfc0b69e3e6da)
tak, aby wartość oczekiwana wynosiła
![{\rm E}[\hat g]\,\,\, \approx \,\,\,\,k\alpha \left( {\mu _\theta } \right)\,\,\, + \,\,\,{1 \over 2}\,\,{k \over {32}}\left[ {9\cos \left( {\mu _\theta } \right)\,\,\, - \,\,\,\cos \left( {2\mu _\theta } \right)} \right]\sigma _\theta ^2](https://wikimedia.org/api/rest_v1/media/math/render/svg/2282240a0ab1440d67b0d0a11f1d92831a71da5c)
a kropkowana linia pionowa, wynikająca z tego równania, zgadza się z obserwowaną średnią.
Wybór metody analizy danych
Wstęp
We wstępie wspomniano, że istnieją dwa sposoby analizy zbioru pomiarów okresu drgań T wahadła:
- Metoda 1 : uśrednić n pomiarów T , użyć tej średniej w równaniu (2), aby otrzymać końcowe oszacowanie g ;
- Metoda 2 : użyj wszystkich n indywidualnych pomiarów T w równaniu (2), jeden po drugim, aby uzyskać n oszacowań g , uśrednij je, aby uzyskać końcowe oszacowanie g .
Rozsądnie byłoby sądzić, że oznacza to to samo i że nie ma powodu, aby preferować jedną metodę nad drugą. Jednak metoda 2 powoduje błąd systematyczny, którego nie można usunąć poprzez zwiększenie wielkości próbki. Metoda 1 jest również obciążona, ale to obciążenie maleje wraz z wielkością próby. Błąd ten w obu przypadkach nie jest szczególnie duży i nie należy go mylić z błędem omówionym w pierwszej części. To, co można nazwać „błędem typu I”, wynika z systematycznego błędu w procesie pomiaru; „Odchylenie typu II” wynika z transformacji zmiennej losowej pomiaru za pomocą modelu nieliniowego; tutaj równanie (2).
Odchylenie typu II charakteryzuje się wyrazami następującymi po pierwszym w równaniu (14). Jak obliczono dla symulacji na fig. 4, odchylenie w oszacowanej g dla rozsądnej zmienności mierzonych czasów (0,03 s) otrzymano z równania (16) i wynosiło tylko około 0,01 m/ s2 . Przestawiając część odchylenia (drugi wyraz) równania (16) i używając β dla odchylenia,

korzystając z przykładowych parametrów wahadła. Z tego widać, że odchylenie zmienia się jako kwadrat błędu względnego w okresie T ; dla większego błędu względnego, około dziesięciu procent, odchylenie wynosi około 0,32 m/s2 , co jest bardziej niepokojące.
Wielkość próbki
To, czego tutaj brakuje i celowo tego unikano we wszystkich wcześniejszych materiałach, to wpływ wielkości próby na te obliczenia. Liczba pomiarów n nie pojawiła się dotychczas w żadnym równaniu. W sposób dorozumiany cała analiza dotyczyła podejścia Metody 2, polegającego na wykonywaniu jednego pomiaru (np. T ) naraz i przetwarzaniu go za pomocą równania (2) w celu uzyskania oszacowania g .
Aby użyć różnych równań opracowanych powyżej, potrzebne są wartości średniej i wariancji kilku parametrów, które pojawiają się w tych równaniach. W praktycznych eksperymentach wartości te zostaną oszacowane na podstawie zaobserwowanych danych, tj. pomiarów. Pomiary te są uśredniane w celu uzyskania oszacowanych wartości średnich do wykorzystania w równaniach, np. do oceny pochodnych cząstkowych. Zatem wariancja zainteresowania jest wariancją średniej , a nie populacji, i tak np.

co odzwierciedla fakt, że wraz ze wzrostem liczby pomiarów T wariancja średniej wartości T będzie się zmniejszać. Istnieje pewna nieodłączna zmienność w T i zakłada się, że pozostaje ona stała, ale zmienność średniej T będzie się zmniejszać wraz ze wzrostem n . Zakładając brak kowariancji między parametrami (pomiarami), rozwinięcie równania (13) lub (15) można zapisać jako

gdzie indeks dolny na n odzwierciedla fakt, że dla kilku zmiennych można wykonać różne liczby pomiarów (np. 3 dla L , 10 dla T , 5 dla θ itd.)
Ta zależność ogólnej wariancji od liczby pomiarów implikuje, że elementem statystycznego projektu eksperymentalnego byłoby zdefiniowanie takich rozmiarów próbek, aby utrzymać ogólny błąd względny (precyzję) w pewnych rozsądnych granicach. Mając oszacowanie zmienności poszczególnych pomiarów, być może z badania pilotażowego, powinno być możliwe oszacowanie, jakie rozmiary próbek (liczba powtórzeń do pomiaru, np. T w przykładzie z wahadłem ) byłyby wymagane.
Wracając do błędu typu II w metodzie 2, równanie (19) można teraz dokładniej zapisać jako

gdzie s jest szacowanym odchyleniem standardowym n T T pomiarów. W metodzie 2 każdy pojedynczy T jest używany do oszacowania g , tak że n T = 1 dla tego podejścia. Z drugiej strony, dla metody 1, T są najpierw uśredniane przed użyciem równania (2), tak że n T jest większe niż jeden. To znaczy że

który mówi, że błąd typu II metody 2 nie zmniejsza się wraz z wielkością próby ; jest stały. Z drugiej strony wariancja oszacowania g jest w obu przypadkach

ponieważ w obu metodach n pomiarów T jest używanych do utworzenia średniego oszacowania g . Zatem wariancja maleje wraz z wielkością próby dla obu metod.
Efekty te są zilustrowane na rysunkach 6 i 7. Na rycinie 6 przedstawiono serię plików PDF z Metody 2 oszacowanych g dla stosunkowo dużego błędu względnego w pomiarach T , przy różnych wielkościach próbek. Względny błąd w T jest większy, niż mogłoby to być rozsądne, więc efekt obciążenia może być wyraźniej widoczny. Na rysunku kropki pokazują średnią; odchylenie jest oczywiste i nie zmienia się wraz z n . Wariancja lub szerokość pliku PDF zmniejsza się wraz ze wzrostem n , a plik PDF staje się również bardziej symetryczny. Na fig. 7 przedstawiono pliki PDF dla metody 1 i widać, że średnie zbliżają się do prawidłowej wartości g wynoszącej 9,8 m/s2 wraz ze wzrostem liczby pomiarów, a wariancja również maleje.
Z tego wnioskuje się, że metoda 1 jest preferowanym podejściem do przetwarzania wahadła lub innych danych.
Dyskusja
Błędy systematyczne w pomiarze wielkości eksperymentalnych prowadzą do błędu systematycznego w wielkości wyprowadzonej, której wielkość jest obliczana za pomocą równania (6) lub równania (7). Istnieje jednak również bardziej subtelna forma odchylenia, która może wystąpić, nawet jeśli wejściowe, mierzone wielkości są nieobciążone; wszystkie wyrazy po pierwszym w równaniu (14) reprezentują to odchylenie. Wynika to z nieliniowych przekształceń zmiennych losowych, które często stosuje się do uzyskania wielkości pochodnej. Na błąd transformacji ma wpływ względna wielkość wariancji mierzonej wielkości w porównaniu z jej średnią. Im większy jest ten współczynnik, tym bardziej przekrzywiony może być plik PDF z pochodną wielkością i tym większe może być obciążenie.
Przybliżenia szeregów Taylora zapewniają bardzo użyteczny sposób oszacowania zarówno odchylenia, jak i zmienności w przypadkach, w których PDF wielkości pochodnej jest nieznany lub trudny do określenia. Średnią można oszacować za pomocą równania (14), a wariancję za pomocą równania (13) lub równania (15). Istnieją jednak sytuacje, w których to podejście oparte na aproksymacji szeregu Taylora pierwszego rzędu nie jest odpowiednie - zwłaszcza jeśli którakolwiek ze zmiennych składowych może zniknąć. Wtedy przydatne byłoby rozwinięcie drugiego rzędu ; patrz Meyer, aby zapoznać się z odpowiednimi wyrażeniami.
Wielkość próby jest ważnym czynnikiem w projektowaniu eksperymentu. Aby zilustrować wpływ wielkości próby, równanie (18) można przepisać jako

gdzie pokazane są wartości średnie (słupki) i oszacowane odchylenia standardowe s , podobnie jak odpowiednie wielkości próbek. W zasadzie, stosując bardzo duże n, RE oszacowanego g można sprowadzić do dowolnie małej wartości. Jednak często istnieją ograniczenia lub praktyczne powody dla stosunkowo niewielkiej liczby pomiarów.
Pominięto szczegóły dotyczące różnicy między wariancją a błędem średniokwadratowym (MSe). Zasadniczo MSe szacuje zmienność względem prawdziwej (ale nieznanej) średniej rozkładu. Ta zmienność składa się z (1) zmienności względem rzeczywistej, obserwowanej średniej oraz (2) składnika, który wyjaśnia, jak daleko ta obserwowana średnia różni się od prawdziwej średniej. Zatem

gdzie β to odchylenie (odległość). Jest to statystyczne zastosowanie twierdzenia o równoległych osiach z mechaniki .
Podsumowując, zlinearyzowana aproksymacja wartości oczekiwanej (średniej) i wariancji nieliniowo przekształconej zmiennej losowej jest bardzo użyteczna i znacznie prostsza w zastosowaniu niż bardziej skomplikowany proces znajdowania jej PDF, a następnie jej pierwszych dwóch momentów. W wielu przypadkach to drugie podejście jest w ogóle niewykonalne. Matematyka linearyzowanego przybliżenia nie jest trywialna i można jej uniknąć, używając wyników zbieranych dla często spotykanych funkcji zmiennych losowych.
Wyprowadzanie propagacji równań błędów
Zarys procedury
- Dla danej funkcji z kilku zmiennych losowych x poszukiwana jest średnia i wariancja z .
- Bezpośrednie podejście polega na znalezieniu PDF dla z , a następnie znalezieniu jego średniej i wariancji:
![{\rm E}[z]\,\,\, = \,\,\,\int {z\,\,{\rm PDF}_z } \,\,dz\,\,\,\,\,\,\,\,\,\,\,\,\,{\rm Var}[z]\,\, = \,\,\int {\left( {z - {\rm E}[z]} \right)^2 \,\,{\rm PDF}_z } \,\,dz](https://wikimedia.org/api/rest_v1/media/math/render/svg/232daf6eb74e3d2bbd387a5e3b00446c5c91a380)
3. Znalezienie pliku PDF nie jest trywialne, aw niektórych przypadkach może nawet nie być możliwe, az pewnością nie jest praktyczną metodą do zwykłych celów analizy danych. Nawet jeśli plik PDF można znaleźć, znalezienie momentów (powyżej) może być trudne.
4. Rozwiązaniem jest rozwinięcie funkcji z w szereg Taylora drugiego rzędu ; rozwinięcie odbywa się wokół średnich wartości kilku zmiennych x . (Zwykle ekspansja jest wykonywana do pierwszego rzędu; składniki drugiego rzędu są potrzebne do znalezienia błędu w średniej. Te wyrażenia drugiego rzędu są zwykle odrzucane przy znajdowaniu wariancji; patrz poniżej).
5. Mając rozwinięcie w ręku, znajdź oczekiwaną wartość. Da to przybliżenie średniej z i będzie zawierało terminy reprezentujące wszelkie odchylenia. W efekcie rozwinięcie „izoluje” zmienne losowe x , aby można było znaleźć ich oczekiwania.
6. Mając wyrażenie na wartość oczekiwaną z , które będzie obejmowało pochodne cząstkowe oraz średnie i wariancje zmiennych losowych x , ułóż wyrażenie na oczekiwaną wariancję:
![{\rm Var}[z]\,\,\, \equiv \,\,{\rm E}\left[ {\left( {\,z\,\, - \,\,{\rm E}[z]\,} \right)^2 } \right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/e6e5e0ef31113e96028643852b95266811e25104)
to znaczy znajdź ( z − E [ z ] ) i wykonaj niezbędną algebrę , aby zebrać terminy i uprościć.
7. W większości przypadków wystarczy zachować tylko warunki pierwszego rzędu; podnieś tę ilość do kwadratu.
8. Znajdź wartość oczekiwaną tego wyniku. Będzie to przybliżenie dla wariancji z .
Wielowymiarowe szeregi Taylora
Jest to podstawowa zależność dla rozwinięcia drugiego rzędu używanego w przybliżeniach:

Przykładowe rozwinięcie: p = 2
Aby zmniejszyć bałagan w notacjach, symbole oceny średniej nie są wyświetlane:

co zmniejsza się do

Aproksymacja dla średniej z
Korzystając z poprzedniego wyniku, przyjmij oczekiwane wartości:
![{\rm E}\left[ {z\left( {\bar x_1 \,\,\,\bar x_2 } \right)} \right]\,\,\, = \,\,\,z\left( {\mu _1 \,\,\,\mu _2 \,} \right)\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,{\rm E}\left[ {{{\partial z} \over {\partial x_1 }}\left( {x_1 - \,\,\bar x_1 } \right)} \right]\,\,\,\,\, = \,\,\,\,\,{{\partial z} \over {\partial x_1 }}{\rm E}\left[ {\left( {x_1 - \,\,\bar x_1 } \right)} \right]\,\,\, = \,\,0](https://wikimedia.org/api/rest_v1/media/math/render/svg/4ad6a396dfba0b80296bf6e1ac192c368b79ffd2)
i podobnie dla x 2 . Cząstki cząstkowe wykraczają poza oczekiwania, ponieważ oceniane według odpowiednich wartości średnich będą stałymi. Powyższy wynik zerowy wynika, ponieważ oczekiwana wartość sumy lub różnicy jest sumą lub różnicą oczekiwanych wartości, tak że dla dowolnego i
![{\rm E}\left[ {x_i - \bar x_i } \right]\,\,\, = \,\,\,{\rm E}\left[ {x_i } \right]\,\,\, - \,\,\,{\rm E}\left[ {\bar x_i } \right]\,\,\, = \,\,\,\mu _i - \,\,\mu _i \,\,\, = \,\,\,0](https://wikimedia.org/api/rest_v1/media/math/render/svg/3aee2169b478341a4c2556cf85d0bfda77b33953)
Kontynuując,
![{\rm E}\left[ {{1 \over 2}{{\partial ^2 z} \over {\partial x_1 ^2 }}\left( {x_1 - \,\,\bar x_1 } \right)^2 } \right]\,\,\, = \,\,\,{1 \over 2}\,{{\partial ^2 z} \over {\partial x_1 ^2 }}\,{\rm E}\left[ {\left( {x_1 - \,\,\bar x_1 } \right)^2 } \right]\,\,\, = \,\,\,{1 \over 2}\,{{\partial ^2 z} \over {\partial x_1 ^2 }}\sigma _1^2](https://wikimedia.org/api/rest_v1/media/math/render/svg/e3946371042d2d61cc8fd36c184c8d1593346408)
i podobnie dla x 2 . Wreszcie,
![{\rm E}\left[ {{{\partial ^2 z} \over {\partial x_1 \partial x_2 }}\left( {x_1 - \,\,\bar x_1 } \right)\left( {x_2 - \,\,\bar x_2 } \right)} \right]\,\,\, = \,\,\,{{\partial ^2 z} \over {\partial x_1 \partial x_2 }}\,{\rm E}\left[ {\left( {x_1 - \,\,\bar x_1 } \right)\left( {x_2 - \,\,\bar x_2 } \right)} \right]\,\,\, = \,\,\,{{\partial ^2 z} \over {\partial x_1 \partial x_2 }}\sigma _{1,2}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f8ac29b5f41368b08f31cfec3a6c44bbebe51558)
gdzie σ 1,2 jest kowariancją x 1 i x 2 . (Często przyjmuje się, że jest to zero, poprawnie lub nie). Następnie wyrażenie na przybliżenie średniej pochodnej zmiennej losowej z to
![{\rm E}[z] \approx \,\,\,z\left( {\mu _1 \,\,\mu _2 } \right)\,\,\, + \,\,\,{1 \over 2}\left\{ {{{\partial ^2 z} \over {\partial x_1^2 }}\,\,\sigma _1^2 \,\, + \,\,\,{{\partial ^2 z} \over {\partial x_2^2 }}\,\,\sigma _2^2 } \right\}\,\,\, + \,\,\,{{\partial ^2 z} \over {\partial x_1 \partial x_2 }}\,\,\sigma _{1,2}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c60e4f55bcced559e33d6e30d99a9ddec64a7be8)
gdzie wszystkie terminy po pierwszym reprezentują odchylenie w z . To równanie jest potrzebne do znalezienia przybliżenia wariancji, ale samo w sobie jest przydatne; co ciekawe, nie pojawia się w większości tekstów dotyczących analizy danych.
Aproksymacja dla wariancji z
Następnym krokiem od definicji wariancji byłoby odjęcie właśnie znalezionej wartości oczekiwanej od wcześniej znalezionego rozwinięcia z . To prowadzi do
![\begin{array}{l}
\left( {z - {\rm E}[z]} \right)^2 \approx \,\,\,\left[ \begin{array}{l}
\left\{ {\frac{{\partial z}}{{\partial x_1 }}\left( {x_1 - \,\,\bar x_1 } \right)\,\, + \,\,\,\frac{{\partial z}}{{\partial x_2 }}\left( {x_2 - \,\,\bar x_2 } \right)} \right\}\,\,\, + \\
\,\,\,\frac{{\partial ^2 z}}{{\partial x_1 \partial x_2 }}\left[ {\left( {x_1 - \,\,\bar x_1 } \right)\left( {x_2 - \,\,\bar x_2 } \right)\,\, - \,\,\sigma _{1,2} } \right]\,\,\, + \\
\,\,\,\frac{1}{2}\frac{{\partial ^2 z}}{{\partial x_1^2 }}\left[ {\left( {x_1 - \,\,\bar x_1 } \right)^2 - \,\,\sigma _1^2 } \right]\,\,\, + \,\,\,\frac{1}{2}\frac{{\partial ^2 z}}{{\partial x_2^2 }}\left[ {\left( {x_2 - \,\,\bar x_2 } \right)^2 - \,\,\sigma _2^2 } \right] \\
\end{array} \right]^2 \\
\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\, \\
\end{array}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c64465811a1d6cdd257c1c19095fbafd8a5eda44)
Oczywiste jest, że rozważenie terminów drugiego rzędu doprowadzi do bardzo skomplikowanego i niepraktycznego wyniku (chociaż, jeśli znikną terminy pierwszego rzędu, konieczne będzie użycie wszystkich terminów powyżej; patrz Meyer, s. 46). Dlatego weź tylko wyrazy liniowe (w nawiasach klamrowych) i kwadrat:
![\left( {z\,\, - \,\,{\rm E}[z]} \right)^2 \approx \,\,\,\left( {\frac{{\partial z}}{{\partial x_1 }}} \right)^2 \left( {x_1 - \bar x_1 } \right)^2 \,\, + \,\,\,\,\left( {\frac{{\partial z}}{{\partial x_2 }}} \right)^2 \left( {x_2 - \bar x_2 } \right)^2 \,\, + \,\,\,2\left( {\frac{{\partial z}}{{\partial x_1 }}} \right)\left( {\frac{{\partial z}}{{\partial x_2 }}} \right)\left( {x_1 - \bar x_1 } \right)\left( {x_2 - \bar x_2 } \right)](https://wikimedia.org/api/rest_v1/media/math/render/svg/828f3737e50e569ac16997909976dcb695a251ba)
Ostatnim krokiem jest przyjęcie oczekiwanej wartości tego
![\begin{array}{l}
{\rm Var}[z]\,\, \equiv \,{\rm E}\left[ {\left( {z\,\, - \,\,{\rm E}[z]} \right)^2 } \right]\,\,\, \approx \,\,\,\left( {\frac{{\partial z}}{{\partial x_1 }}} \right)^2 {\rm E}\left[ {\left( {x_1 - \bar x_1 } \right)^2 } \right]\,\, + \\
\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\left( {\frac{{\partial z}}{{\partial x_2 }}} \right)^2 {\rm E}\left[ {\left( {x_2 - \bar x_2 } \right)^2 } \right]\,\,\,\,\, + \,\,\,\,2\left( {\frac{{\partial z}}{{\partial x_1 }}} \right)\left( {\frac{{\partial z}}{{\partial x_2 }}} \right){\rm E}\left[ {\left( {x_1 - \bar x_1 } \right)\left( {x_2 - \bar x_2 } \right)} \right] \\
\end{array}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1a5463317a6c868d655d6ba1fd66fafa72ca368b)
co prowadzi do dobrze znanego wyniku
![{\rm Var}[z]\,\,\,\, \approx \,\,\,\left( {\frac{{\partial z}}{{\partial x_1 }}} \right)^2 \sigma _1^2 \,\,\, + \,\,\,\,\left( {\frac{{\partial z}}{{\partial x_2 }}} \right)^2 \sigma _2^2 \,\,\, + \,\,\,\,2\left( {\frac{{\partial z}}{{\partial x_1 }}} \right)\left( {\frac{{\partial z}}{{\partial x_2 }}} \right)\sigma _{1,2}](https://wikimedia.org/api/rest_v1/media/math/render/svg/91022d275ca7d5cfcffa1ddf4b7d9d21f47b8992)
i jest to uogólnione dla zmiennych p jako zwykła formuła „propagacji błędu”.
![{\rm Var}[z]\,\,\, \approx \,\,\,\sum\limits_{i = 1}^p {\sum\limits_{j = 1}^p {\left( {\frac{{\partial z}}{{\partial x_i }}} \right)} } \left( {\frac{{\partial z}}{{\partial x_j }}} \right)\sigma _{i,j}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4ba7194f56e65bdc6f04d09f0e7cce4fcb271833)
przy założeniu, że kowariancja zmiennej z samą sobą jest jej wariancją. Istotne jest, aby uznać, że wszystkie te pochodne cząstkowe należy oceniać na podstawie średniej odpowiednich zmiennych x i że odpowiadające im wariancje są wariancjami tych średnich . Aby to wzmocnić,
![{\rm E}[z] \approx \,\,\,z\left( {\bar x _1 \,\,\bar x _2 } \right)\,\,\, + \,\,\,\frac{1}{2}\left\{ {\left. {\frac{{\partial ^2 z}}{{\partial x_1^2 }}} \right|_{\bar x_1 } \,\,{\sigma _1^2 \over n_1} \,\,\,\, + \,\,\,\,\,\left. {\frac{{\partial ^2 z}}{{\partial x_2^2 }}} \right|_{\bar x_2 } \,{\sigma _2^2 \over n_2} } \right\}\,\,\, + \,\,\,\,\left. {\frac{{\partial ^2 z}}{{\partial x_1 \partial x_2 }}} \right|_{\bar x_1 ,\bar x_2 } \,\,{\sigma _{1,2} \over n_{1,2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8ec26fa7fa6b7e109f74374cffbf2ac3ec03714a)
![{\rm Var}[z]\,\,\, \approx \,\,\,\sum\limits_{i = 1}^p {\,\sum\limits_{j = 1}^p {\,\left( {\frac{{\partial z}}{{\partial x_i }}} \right)_{\bar x_i } } } \left( {\frac{{\partial z}}{{\partial x_j }}} \right)_{\bar x_j } {\sigma _{i,j} \over n_{i,j}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bcf2e20ca9fcd47d6c3821a29ccb5759b17e494b)
Tabela wybranych równań niepewności
Przypadek jednowymiarowy 1

UWAGI: r może być liczbą całkowitą lub ułamkową, dodatnią lub ujemną (lub zerem). Jeśli r jest ujemne, upewnij się, że zakres x nie zawiera zera. Jeśli r jest ułamkiem z parzystym dzielnikiem, upewnij się, że x nie jest ujemne. „n” to wielkość próbki. Wyrażenia te są oparte na analizie danych „Metody 1”, w której zaobserwowane wartości x są uśredniane przed zastosowaniem transformacji (tj. w tym przypadku podniesienia do potęgi i pomnożenia przez stałą).
Obciążenie typu I, bezwzględne............................................................ .......................Równanie(1.1)

Błąd typu I, względny (ułamkowy)............................................ ...............Równ.(1.2)

Średnia (wartość oczekiwana)............................................................ ...........................Równanie(1.3)
![{\rm E}[z]\,\,\, = \,\,\,\mu _z \approx \,\,a\mu ^r \,\,\, + \,\,\,{1 \over 2}a\,r\left( {r - 1} \right)\,\,\mu ^{r - 2} \,\,{{\sigma ^2 } \over n}](https://wikimedia.org/api/rest_v1/media/math/render/svg/48f37a5b4afca22b7e5d4c49f67d211a592f2fe7)
Odchylenie typu II, absolutne............................................. ...........................Równ.(1.4)

Odchylenie typu II, ułamkowe............................................ ........................... Równanie (1,5)

Wariancja, absolutna ......................................................................... ...........................Równ.(1.6)

Odchylenie standardowe, ułamkowe............................................. ............. Równanie (1,7)

Uwagi:
- (1) Na równania obciążenia typu I 1.1 i 1.2 nie ma wpływu wielkość próby n .
- (2) Równanie(1.4) jest przekształceniem drugiego wyrazu w równaniu(1.3).
- (3) Odchylenie typu II oraz wariancja i odchylenie standardowe zmniejszają się wraz ze wzrostem wielkości próby, a także zmniejszają się dla danej wielkości próby, gdy odchylenie standardowe x σ staje się małe w porównaniu z jego średnią μ .
Przypadek jednowymiarowy 2

UWAGI: b może być dodatnie lub ujemne. „n” to wielkość próbki. Należy pamiętać, że skuteczność tych przybliżeń jest bardzo silnie zależna od względnych rozmiarów μ, σ i b.
Obciążenie typu I, absolutne .............................................................. ..............................Równanie(2.1)

Błąd typu I, względny (ułamkowy)............................................ ...............Równanie(2.2)

Średnia (wartość oczekiwana)............................................................ ........................... Równanie (2.3)
![{\rm E}[z]\,\,\, = \,\,\,\mu _z \approx \,\,ae^{b\,\mu } \,\,\, + \,\,\,\frac{1}{2}\,\,a\,b^2 e^{b\,\mu } \,\,\frac{{\sigma ^2 }}{n}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0ea099927e42451dc088f5a2b660c20e750a9448)
Obciążenie typu II, bezwzględne............................................ ...........................Równ.(2.4)

Odchylenie typu II, ułamkowe............................................ ...........................Równanie(2.5)

Wariancja, absolutna ......................................................................... ..............................Równanie(2.6)

Odchylenie standardowe, ułamkowe............................................ ..............Równanie(2.7)

Przypadek jednowymiarowy 3

UWAGI: b i x muszą być dodatnie. „n” to wielkość próbki. Należy pamiętać, że skuteczność tych przybliżeń jest bardzo silnie zależna od względnych rozmiarów μ, σ i b.
Obciążenie typu I, bezwzględne............................................................ .......................Równanie(3.1)

Błąd typu I, względny (ułamkowy)............................................ ............... Równanie (3.2)

Średnia (wartość oczekiwana)............................................................ ...........................Równanie(3.3)
![{\rm E}[z]\,\,\, = \,\,\,\mu _z \approx \,\,a\ln (b\mu )\,\,\, - \,\,\,\,\frac{1}{2}\,\,\frac{a}{{\mu ^2 }}\,\,\frac{{\sigma ^2 }}{n}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d48708f098040da3dd8fa00050c2dd02bdb9cf9c)
Obciążenie typu II, bezwzględne............................................ ...........................Równ.(3.4)

Odchylenie typu II, ułamkowe............................................ ...........................Równanie(3.5)

Wariancja, absolutna ......................................................................... .......................Równanie(3.6)

Odchylenie standardowe, ułamkowe............................................ ............. Równanie (3.7)

Przypadek wielowymiarowy 1
![z\,\, = \,\,a\,x_1 \, + \,\,b\,x_2 \,\,\,\,\,\,\,\,\,\,\left[ {x_1 \,\,x_2 } \right]\,\, \sim \,\,BVN\left( {\mu _1 ,\,\,\mu _2 ,\,\,\sigma _1^2 ,\,\,\sigma _2^2 ,\,\,\sigma _{1,2} } \right)\,\,\,\,\,\,\,a,b\,\,{\rm constants}](https://wikimedia.org/api/rest_v1/media/math/render/svg/87554bcdbe6904b013ec7b92f83852537648d2c4)
UWAGI: BVN to dwuwymiarowy normalny plik PDF. „n” to wielkość próbki.
Obciążenie typu I, bezwzględne............................................................ ............................Równanie(4.1)

Błąd typu I, względny (ułamkowy)............................................ ............... Równanie (4.2)

Średnia (wartość oczekiwana)............................................................ ........................... Równanie (4.3)
![{\rm E}[z]\,\,\, = \,\,\,\mu _z \,\, \approx \,\,\,\,a\mu _1 + \,\,b\mu _2](https://wikimedia.org/api/rest_v1/media/math/render/svg/a57a9617eb0c3bda20eaee1da3a54999f115a10d)
Obciążenie typu II, bezwzględne............................................ ...........................Równ.(4.4)

Odchylenie typu II, ułamkowe............................................ ........................... Równanie (4.5)

Wariancja, absolutna ......................................................................... ...........................Równanie(4.6)
![\sigma _z^2 \approx \,\,\,\frac{1}{n}\,\,\left[ {a^2 \sigma _1^2 \,\, + \,\,\,b^2 \sigma _2^2 \,\,\, + \,\,\,2\,a\,b\,\sigma _{1,2} } \right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/2fe4980c561c323cc07cdcede9320475518f42ce)
Odchylenie standardowe, ułamkowe............................................ ............... Równanie (4.7)
To jest skomplikowane, nie ma sensu, nie upraszcza do niczego użytecznego; używać (4.6)
Przypadek wielowymiarowy 2
![z\,\, = \,\,a\,\,x_1^\alpha \,x_2^\beta \,\,\,\,\,\,\,\,\,\,\left[ {x_1 \,\,x_2 } \right]\,\, \sim \,\,BVN\left( {\mu _1 ,\,\,\mu _2 ,\,\,\sigma _1^2 ,\,\,\sigma _2^2 ,\,\,\sigma _{1,2} } \right)\,\,\,\,\,\,\,\alpha ,\beta \,\,{\rm constants}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bf64958cac096e19ff5a8ce2cf5710a8ae34a891)
Obciążenie typu I, bezwzględne............................................................ ............................Równanie(5.1)

Błąd typu I, względny (ułamkowy)............................................ ............... Równanie (5.2)

Średnia (wartość oczekiwana)............................................................ ...........................Równanie(5.3)
![{\rm E}[z]\,\,\, = \,\,\,\mu _z \,\, \approx \,\,\,\,a\mu _1^\alpha \mu _2^\beta \,\, + \,\,\,\frac{a}{2n}\left[ \begin{array}{l}
\left( {\alpha \left( {\alpha - 1} \right)\mu _1^{\alpha - 2} \mu _2^\beta } \right)\sigma _1^2 + \\
\left( {\beta \left( {\beta - 1} \right)\mu _1^\alpha \mu _2^{\beta - 2} } \right)\sigma _2^2 + \\
\left( {2\,\alpha \,\beta \,\mu _1^{\alpha - 1} \,\mu _2^{\beta - 1} } \right)\sigma _{1,2} \\
\end{array} \right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/b0a34e21fb873707a4f9963f886387a66d4f5323)
Obciążenie typu II, bezwzględne............................................ ...........................Równ.(5.4)
![\beta \,\,\,\, \approx \,\,\,\,\frac{a}{2n}\left[ \begin{array}{l}
\left( {\alpha \left( {\alpha - 1} \right)\mu _1^{\alpha - 2} \mu _2^\beta } \right)\sigma _1^2 + \\
\left( {\beta \left( {\beta - 1} \right)\mu _1^\alpha \mu _2^{\beta - 2} } \right)\sigma _2^2 + \\
\left( {2\,\alpha \,\beta \,\mu _1^{\alpha - 1} \,\mu _2^{\beta - 1} } \right)\sigma _{1,2} \\
\end{array} \right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/89318d4667cea9987815d658749305d1acf2581a)
Odchylenie typu II, ułamkowe............................................ ...........................Równanie(5.5)
![\frac{\beta }{z}\,\,\, = \,\,\,\frac{1}{{2n}}\left[ {\alpha \left( {\alpha - 1} \right)\left( {\frac{{\sigma _1 }}{{\mu _1 }}} \right)^2 + \,\,\,\beta \left( {\beta - 1} \right)\left( {\frac{{\sigma _2 }}{{\mu _2 }}} \right)^2 \,\, + \,\,\,\,2\,\alpha \,\beta \left( {\frac{{\sigma _{1,2} }}{{\mu _1 \,\mu _2 }}} \right)\,} \right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/504e73eec178b3cf327de43b03a076df36f88383)
Wariancja, absolutna ......................................................................... .........................Równanie(5.6)
![\sigma _z^2 \approx \,\,\,\frac{a^2 }{n}\,\,\left[ {\left( \alpha \,\mu _1^{\alpha - 1} \mu _2^\beta \right)^2 \sigma _1^2 \,\,\, + \,\,\,\left( \beta \,\mu _1^\alpha \mu _2^{\beta - 1} \right)^2 \sigma _2^2 \,\,\, + \,\,\,\left( 2\alpha \,\beta \,\mu _1^{2\alpha - 1} \mu _2^{2\beta - 1} \right)\sigma _{1,2} } \right]](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d13e3f87c69a07fb75f0f4f5d0444b5b135784d)
Odchylenie standardowe, ułamkowe............................................ ............. Równanie (5.7)

Galeria figurek

Rysunek 1
Rysunek 2
Rysunek 3

Rysunek 4

Rysunek 5
Rysunek 6
Rysunek 7







Zobacz też
- Analiza wrażliwości
- Propagacja niepewności
- Analiza niepewności
- Bezstronne oszacowanie odchylenia standardowego
- Przedziałowy element skończony
Linki zewnętrzne
- Interaktywna grafika Java , która ilustruje błędy w przetwarzaniu metody 1 i metody 2.